PWM ohjain. Pulssinleveysmodulaatio. Kaavio. Nopeussäädin kommutaattorimoottorille: moottorin pyörimisen stabilisaattorin suunnittelu ja valmistus.
Yksinkertaisin tapa ohjata tasavirtamoottorin pyörimisnopeutta perustuu pulssinleveysmodulaation (PWM tai PWM) käyttöön. Tämän menetelmän ydin on, että syöttöjännite syötetään moottoriin pulssien muodossa. Tässä tapauksessa pulssin toistotaajuus pysyy vakiona, mutta niiden kesto voi vaihdella.
PWM-signaalille on tunnusomaista sellainen parametri kuin käyttöjakso tai toimintajakso. Tämä on toimintajakson käänteisluku ja on yhtä suuri kuin pulssin keston suhde sen jaksoon.
D = (t/T) * 100 %
Alla olevat kuvat esittävät PWM-signaaleja eri käyttöjaksoilla.
Tällä ohjausmenetelmällä moottorin pyörimisnopeus on verrannollinen PWM-signaalin käyttöjaksoon.
Yksinkertainen tasavirtamoottorin ohjauspiiri
Yksinkertaisin tasavirtamoottorin ohjauspiiri koostuu kenttätransistorista, jonka hilaan syötetään PWM-signaali. Tämän piirin transistori toimii elektronisena kytkimenä, joka kytkee yhden moottorin liittimistä maahan. Transistori avautuu pulssin keston hetkellä.

Miten moottori käyttäytyy, kun se käynnistetään näin? Jos PWM-signaalin taajuus on alhainen (useita hertsejä), moottori pyörii nykivästi. Tämä on erityisen havaittavissa PWM-signaalin pienellä käyttöjaksolla.
Satojen hertsien taajuudella moottori pyörii jatkuvasti ja sen pyörimisnopeus muuttuu suhteessa käyttöjaksoon. Karkeasti sanottuna moottori "havaitsee" sille toimitetun energian keskiarvon.
Piiri PWM-signaalin muodostamiseksi
PWM-signaalin muodostamiseen on monia piirejä. Yksi yksinkertaisimmista on 555-ajastimeen perustuva piiri. Se vaatii vähintään komponentteja, ei vaadi asennusta ja se voidaan koota yhdessä tunnissa.
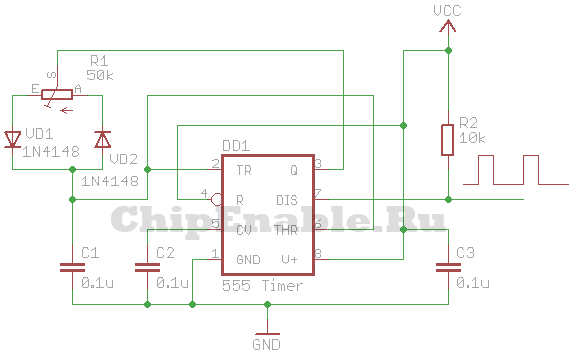
VCC-piirin syöttöjännite voi olla välillä 5 - 16 volttia. Melkein mitä tahansa diodeja voidaan käyttää diodeina VD1 - VD3.
Jos olet kiinnostunut ymmärtämään, kuinka tämä piiri toimii, sinun on viitattava 555-ajastimen lohkokaavioon. Ajastin koostuu jännitteenjakajasta, kahdesta komparaattorista, flip-flopista, avoimen kollektorin kytkimestä ja lähtöpuskurista.

Virtalähde (VCC) ja nollausnastat on kytketty virtalähteeseen plus esimerkiksi +5 V ja maadoitusnasta (GND) miinukseen. Transistorin avoin kollektori (DISC-nasta) on kytketty vastuksen kautta positiiviseen virtalähteeseen ja siitä poistetaan PWM-signaali. CONT-nastaa ei käytetä, siihen on kytketty kondensaattori. THRES- ja TRIG-vertailunastat yhdistetään ja liitetään RC-piiriin, joka koostuu säädettävästä vastuksesta, kahdesta diodista ja kondensaattorista. Säädettävän vastuksen keskinasta on kytketty OUT-nastaan. Vastuksen ääripäät on kytketty diodien kautta kondensaattoriin, joka on kytketty maahan toisella liittimellä. Tämän diodien sisällyttämisen ansiosta kondensaattori ladataan muuttuvan vastuksen yhden osan kautta ja puretaan toisen kautta.
Tällä hetkellä, kun virta kytketään, OUT-nasta on matalalla loogisella tasolla, sitten THRES- ja TRIG-nastat ovat VD2-diodin ansiosta myös matalalla tasolla. Ylempi vertailija vaihtaa lähdön nollaan ja alempi yhdeksi. Liipaisimen lähtö asetetaan nollaan (koska sen lähdössä on invertteri), transistorikytkin sulkeutuu ja OUT-nasta asetetaan korkealle tasolle (koska siinä on invertteri tulossa). Seuraavaksi kondensaattori C3 alkaa latautua diodin VD1 kautta. Kun se latautuu tietylle tasolle, alempi komparaattori vaihtaa nollaan ja sitten ylempi vertailija vaihtaa lähdön yhteen. Liipaisulähtö asetetaan yksikkötasolle, transistorikytkin avautuu ja OUT-nasta asetetaan matalalle tasolle. Kondensaattori C3 alkaa purkaa diodin VD2 kautta, kunnes se on täysin purkautunut ja vertailijat kytkevät liipaisimen toiseen tilaan. Jakso toistetaan sitten.
Tämän piirin tuottaman PWM-signaalin likimääräinen taajuus voidaan laskea seuraavalla kaavalla:
F = 1,44/(R1*C1), [Hz]
missä R1 on ohmeina, C1 on faradeina.
Yllä olevassa kaaviossa ilmoitetuilla arvoilla PWM-signaalin taajuus on yhtä suuri:
F = 1,44/(50000*0,0000001) = 288 Hz.
PWM DC-moottorin nopeuden säädin
Yhdistetään kaksi edellä esitettyä piiriä ja saadaan yksinkertainen tasavirtamoottorin nopeudensäätöpiiri, jolla voidaan ohjata lelun, robotin, mikroporan jne. moottorin nopeutta.
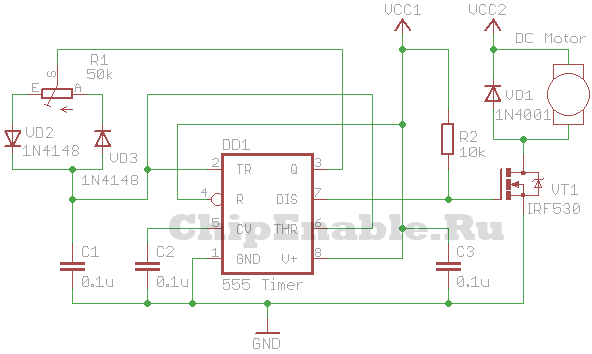
VT1 on n-tyypin kenttätransistori, joka pystyy kestämään suurimman moottorivirran tietyllä jännitteellä ja akselikuormalla. VCC1 on 5 - 16 V, VCC2 on suurempi tai yhtä suuri kuin VCC1.
Kenttätransistorin sijasta voit käyttää bipolaarista n-p-n-transistoria, Darlington-transistoria tai sopivan tehon optorelettä.
Moottorin tasainen toiminta ilman nykimistä tai tehopiikkejä on avain sen kestävyyteen. Näiden indikaattoreiden ohjaamiseen käytetään sähkömoottorin nopeussäädintä 220 V:lle, 12 V:lle ja 24 V:lle. Kaikki nämä taajuudet voidaan valmistaa omin käsin tai ostaa valmiin yksikön.
Miksi tarvitset nopeussäätimen?
Moottorin nopeussäädin, taajuusmuuttaja, on laite, jossa on tehokas transistor, joka on tarpeen jännitteen kääntämiseksi sekä asynkronisen moottorin sujuvan pysäytyksen ja käynnistyksen varmistamiseksi PWM:n avulla. PWM – sähkölaitteiden laajapulssiohjaus. Sitä käytetään luomaan erityinen vaihto- ja tasavirran siniaalto.
Valokuva - tehokas säädin asynkroniselle moottorilleYksinkertaisin esimerkki muuntimesta on tavanomainen jännitteen stabilisaattori. Mutta keskusteltavana olevalla laitteella on paljon laajempi toiminta- ja tehoalue.
Taajuusmuuntajia käytetään kaikissa sähköenergialla toimivissa laitteissa. Säätimet tarjoavat erittäin tarkan sähkömoottorin ohjauksen, jotta moottorin nopeutta voidaan säätää ylös tai alas, ylläpitää kierrokset halutulla tasolla ja suojata instrumentteja äkillisiltä kierroksilta. Tässä tapauksessa sähkömoottori käyttää vain toimintaansa tarvittavan energian sen sijaan, että se pyörisi täydellä teholla.
 Kuva – DC-moottorin nopeuden säädin
Kuva – DC-moottorin nopeuden säädin Miksi tarvitset nopeussäätimen asynkroniseen sähkömoottoriin:
- Energian säästämiseksi. Säätämällä moottorin nopeutta, käynnistyksen ja pysäytyksen sujuvuutta, voimaa ja nopeutta voit saavuttaa merkittäviä säästöjä henkilökohtaisissa varoissa. Esimerkiksi nopeuden vähentäminen 20 % voi johtaa 50 % energiansäästöön.
- Taajuusmuuttajalla voidaan ohjata prosessin lämpötilaa, painetta tai ilman erillistä säädintä;
- Pehmeä käynnistys ei vaadi lisäohjainta;
- Ylläpitokustannukset pienenevät merkittävästi.
Laitetta käytetään usein hitsauskoneessa (pääasiassa puoliautomaattisissa koneissa), sähköliesissä, useissa kodinkoneissa (pölynimuri, ompelukone, radio, pesukone), kodin lämmittimessä, erilaisissa laivamalleissa jne.
Nopeussäätimen toimintaperiaate
Nopeussäädin on laite, joka koostuu seuraavista kolmesta pääosajärjestelmästä:
- AC-moottori;
- Pääaseman ohjain;
- Veto ja lisäosat.
Kun AC-moottori käynnistetään täydellä teholla, virtaa siirretään kuorman täydellä teholla, tämä toistetaan 7-8 kertaa. Tämä virta taivuttaa moottorin käämit ja tuottaa lämpöä, jota syntyy pitkään. Tämä voi merkittävästi lyhentää moottorin käyttöikää. Toisin sanoen muuntaja on eräänlainen askelinvertteri, joka tuottaa kaksinkertaisen energian muuntamisen.
 Valokuva - kaavio kommutaattorimoottorin säätimestä
Valokuva - kaavio kommutaattorimoottorin säätimestä Tulojännitteestä riippuen kolmi- tai yksivaiheisen sähkömoottorin nopeuden taajuussäädin tasasuuntaa 220 tai 380 voltin virran. Tämä toimenpide suoritetaan tasasuuntausdiodilla, joka sijaitsee energiatulossa. Seuraavaksi virta suodatetaan kondensaattoreilla. Seuraavaksi syntyy PWM, sähköpiiri vastaa tästä. Nyt oikosulkumoottorin käämit ovat valmiita lähettämään pulssisignaalin ja integroimaan ne haluttuun siniaaltoon. Jopa mikrosähkömoottorilla nämä signaalit lähetetään kirjaimellisesti erissä.
 Valokuva - sinusoidi sähkömoottorin normaalista toiminnasta
Valokuva - sinusoidi sähkömoottorin normaalista toiminnasta Kuinka valita säädin
On olemassa useita ominaisuuksia, joiden perusteella sinun on valittava nopeussäädin autoon, koneen sähkömoottoriin tai kotitaloustarpeisiin:
- Ohjaustyyppi. Kommutaattorimoottoreille on olemassa säätimet, joissa on vektori- tai skalaariohjausjärjestelmä. Ensimmäisiä käytetään useammin, mutta jälkimmäisiä pidetään luotettavampina;
- Tehoa. Tämä on yksi tärkeimmistä tekijöistä sähköisen taajuusmuuttajan valinnassa. On tarpeen valita taajuusgeneraattori, jonka teho vastaa suojatun laitteen suurinta sallittua tehoa. Mutta pienjännitemoottorille on parempi valita sallittua wattiarvoa tehokkaampi säädin;
- Jännite. Luonnollisesti kaikki täällä on yksilöllistä, mutta jos mahdollista, sinun on ostettava nopeudensäädin sähkömoottorille, jonka kytkentäkaaviossa on laaja valikoima sallittuja jännitteitä;
- Taajuusalue. Taajuusmuunnos on tämän laitteen päätehtävä, joten yritä valita tarpeisiisi parhaiten sopiva malli. Oletetaan, että manuaaliselle reitittimelle 1000 hertsiä riittää;
- Muiden ominaisuuksien mukaan. Tämä on takuuaika, tulojen määrä, koko (työpöytäkoneille ja käsityökaluille on erityinen liite).
Samanaikaisesti sinun on myös ymmärrettävä, että on olemassa niin kutsuttu yleinen pyörimissäädin. Tämä on taajuusmuuttaja harjattomille moottoreille.
 Kuva – säädinkaavio harjattomille moottoreille
Kuva – säädinkaavio harjattomille moottoreille Tässä piirissä on kaksi osaa - yksi on looginen, jossa mikro-ohjain sijaitsee sirulla, ja toinen on teho. Periaatteessa tällaista sähköpiiriä käytetään tehokkaaseen sähkömoottoriin.
Video: sähkömoottorin nopeussäädin SHIRO V2:lla
Kuinka tehdä kotitekoinen moottorin nopeussäädin
Voit tehdä yksinkertaisen triac-moottorin nopeussäätimen, sen kaavio on esitetty alla ja hinta koostuu vain sähköliikkeessä myydyistä osista.
Toimiaksemme tarvitsemme tehokkaan BT138-600-tyypin triakin, jota radiotekniikan aikakauslehti suosittelee.
 Valokuva - tee-se-itse-nopeussäätimen kaavio
Valokuva - tee-se-itse-nopeussäätimen kaavio Kuvatussa piirissä nopeutta säädetään potentiometrillä P1. Parametri P1 määrittää tulevan pulssisignaalin vaiheen, joka puolestaan avaa triakin. Tätä järjestelmää voidaan käyttää sekä peltoviljelyssä että kotona. Voit käyttää tätä säädintä ompelukoneisiin, tuulettimiin, pöytäporakoneisiin.
Toimintaperiaate on yksinkertainen: sillä hetkellä, kun moottori hidastuu hieman, sen induktanssi laskee, mikä lisää jännitettä R2-P1:ssä ja C3:ssa, mikä puolestaan johtaa triakin pidempään avautumiseen.
Tyristoripalautteen säädin toimii hieman eri tavalla. Se mahdollistaa energian virtauksen takaisin energiajärjestelmään, mikä on erittäin taloudellista ja hyödyllistä. Tämä elektroninen laite sisältää tehokkaan tyristorin sisällyttämisen sähköpiiriin. Hänen kaavionsa näyttää tältä:

Tässä tarvitaan tasavirran syöttämiseen ja tasasuuntaukseen ohjaussignaaligeneraattori, vahvistin, tyristori ja nopeudenvakautuspiiri.
Monien puu-, metalli- tai muiden materiaalien töiden suorittamiseen ei vaadita suuria nopeuksia, vaan hyvää pitoa. Olisi oikeampaa sanoa - hetki. Hänen ansiostaan suunniteltu työ voidaan suorittaa tehokkaasti ja pienin tehohäviöin. Tätä tarkoitusta varten käyttölaitteena käytetään DC-moottoreita (tai kommutaattorimoottoreita), joissa syöttöjännite tasasuuntautuu itse yksikön toimesta. Sitten vaadittujen suorituskykyominaisuuksien saavuttamiseksi on tarpeen säätää kommutaattorin moottorin nopeutta ilman tehon menetystä.
Nopeussäädön ominaisuudet
On tärkeää tietää, mitä kukin moottori kuluttaa pyöriessään ei vain aktiivinen, vaan myös loisteho. Tässä tapauksessa loistehon taso on korkeampi, mikä johtuu kuorman luonteesta. Tässä tapauksessa kommutaattorimoottoreiden pyörimisnopeutta säätelevien laitteiden suunnittelun tehtävänä on pienentää pätö- ja loistehojen välistä eroa. Siksi tällaiset muuntimet ovat melko monimutkaisia, eikä niitä ole helppo tehdä itse.
Voit rakentaa vain jonkinlaisen säätimen omin käsin, mutta virransäästöstä on turha puhua. Mitä on valta? Sähköisesti se on otettu virta kerrottuna jännitteellä. Tulos antaa tietyn arvon, joka sisältää aktiiviset ja reaktiiviset komponentit. Vain aktiivisen eristämiseksi, eli häviöiden vähentämiseksi nollaan, on tarpeen muuttaa kuorman luonne aktiiviseksi. Vain puolijohdevastuksilla on nämä ominaisuudet.
Siten, induktanssi on korvattava vastuksella, mutta tämä on mahdotonta, koska moottori muuttuu joksikin muuksi eikä tietenkään saa mitään liikkeelle. Häviöttömän säädön tavoitteena on ylläpitää vääntömomenttia, ei tehoa: se muuttuu silti. Vain muunnin voi selviytyä tällaisesta tehtävästä, joka ohjaa nopeutta muuttamalla tyristorien tai tehotransistorien avauspulssin kestoa.
Yleistetty ohjainpiiri
 Esimerkki säätimestä, joka toteuttaa periaatteen ohjata moottoria ilman tehohäviötä, on tyristorimuunnin. Nämä ovat takaisinkytkentäisiä integroituja piirejä, jotka tarjoavat tiukka sääntely ominaisuudet, jotka vaihtelevat kiihdytyksestä ja jarrutuksesta peruutukseen. Tehokkain on pulssivaiheohjaus: avauspulssien toistotaajuus on synkronoitu verkon taajuuden kanssa. Näin voit ylläpitää vääntömomenttia lisäämättä hävikkiä reaktiivisessa komponentissa. Yleistetty kaavio voidaan esittää useissa lohkoissa:
Esimerkki säätimestä, joka toteuttaa periaatteen ohjata moottoria ilman tehohäviötä, on tyristorimuunnin. Nämä ovat takaisinkytkentäisiä integroituja piirejä, jotka tarjoavat tiukka sääntely ominaisuudet, jotka vaihtelevat kiihdytyksestä ja jarrutuksesta peruutukseen. Tehokkain on pulssivaiheohjaus: avauspulssien toistotaajuus on synkronoitu verkon taajuuden kanssa. Näin voit ylläpitää vääntömomenttia lisäämättä hävikkiä reaktiivisessa komponentissa. Yleistetty kaavio voidaan esittää useissa lohkoissa:
- teho-ohjattu tasasuuntaaja;
- tasasuuntaajan ohjausyksikkö tai pulssivaiheohjauspiiri;
- takogeneraattorin palaute;
- virran ohjausyksikkö moottorin käämeissä.
Ennen kuin syventyy tarkempaan laitteeseen ja säätöperiaatteeseen, on päätettävä kommutaattorimoottorin tyypistä. Sen suorituskykyominaisuuksien ohjausjärjestelmä riippuu tästä.
Kommutaattorimoottorien tyypit
Tunnetaan ainakin kahdenlaisia kommutaattorimoottoreita. Ensimmäinen sisältää laitteet, joissa on ankkuri ja virityskäämi staattorissa. Toinen sisältää laitteet, joissa on ankkuri ja kestomagneetit. On myös tarpeen päättää, mihin tarkoitukseen on tarpeen suunnitella säädin:

Moottorin suunnittelu
Rakenteellisesti Indesit-pesukoneen moottori on yksinkertainen, mutta suunniteltaessa säädintä ohjaamaan sen nopeutta, on tarpeen ottaa huomioon parametrit. Moottoreilla voi olla erilaisia ominaisuuksia, minkä vuoksi myös ohjaus muuttuu. Myös toimintatila otetaan huomioon, mikä määrittää muuntimen suunnittelun. Rakenteellisesti kommutaattorimoottori koostuu seuraavista komponenteista:
- Ankkuri, siinä on käämitys, joka on asetettu sydämen uriin.
- Keräin, mekaaninen vaihtojännitetasasuuntaaja, jonka kautta se siirretään käämiin.
- Staattori kenttäkäämityksellä. On tarpeen luoda jatkuva magneettikenttä, jossa ankkuri pyörii.
 Kun vakiopiirin mukaisesti kytketyn moottoripiirin virta kasvaa, kenttäkäämi kytketään sarjaan ankkurin kanssa. Tällä sisällytyksellä lisäämme myös ankkuriin vaikuttavaa magneettikenttää, jonka avulla voimme saavuttaa ominaisuuksien lineaarisuuden. Jos kenttä pysyy muuttumattomana, on vaikeampaa saada hyvää dynamiikkaa, puhumattakaan suurista tehohäviöistä. Tällaisia moottoreita on parempi käyttää pienillä nopeuksilla, koska niitä on helpompi ohjata pienillä erillisillä liikkeillä.
Kun vakiopiirin mukaisesti kytketyn moottoripiirin virta kasvaa, kenttäkäämi kytketään sarjaan ankkurin kanssa. Tällä sisällytyksellä lisäämme myös ankkuriin vaikuttavaa magneettikenttää, jonka avulla voimme saavuttaa ominaisuuksien lineaarisuuden. Jos kenttä pysyy muuttumattomana, on vaikeampaa saada hyvää dynamiikkaa, puhumattakaan suurista tehohäviöistä. Tällaisia moottoreita on parempi käyttää pienillä nopeuksilla, koska niitä on helpompi ohjata pienillä erillisillä liikkeillä.
Järjestämällä erillinen virityksen ja ankkurin ohjaus voidaan saavuttaa moottorin akselin korkea asemointitarkkuus, mutta ohjauspiiristä tulee tällöin huomattavasti monimutkaisempi. Siksi tarkastelemme tarkemmin säädintä, jonka avulla voit muuttaa pyörimisnopeutta 0:sta maksimiarvoon, mutta ilman paikantamista. Tästä voi olla hyötyä, jos pesukoneen moottorista valmistetaan täysimittainen porakone, jolla on kyky leikata kierteitä.
Kaavan valinta
Kun olet selvittänyt kaikki olosuhteet, joissa moottoria käytetään, voit alkaa valmistaa nopeussäädintä kommutaattorimoottorille. Sinun tulisi aloittaa valitsemalla sopiva järjestelmä, joka tarjoaa sinulle kaikki tarvittavat ominaisuudet ja ominaisuudet. Sinun pitäisi muistaa ne:
- Nopeuden säätö 0:sta maksimiin.
- Tarjoaa hyvän vääntömomentin alhaisilla nopeuksilla.
- Tasainen nopeudensäätö.
Tarkasteltaessa monia Internetin järjestelmiä, voimme päätellä, että harvat ihmiset luovat tällaisia "yksiköitä". Tämä johtuu ohjausperiaatteen monimutkaisuudesta, koska on välttämätöntä järjestää monien parametrien säätö. Tyristorin avautumiskulma, ohjauspulssin kesto, kiihdytys-hidastusaika, vääntömomentin nousunopeus. Näitä toimintoja käsittelee ohjaimen piiri, joka suorittaa monimutkaisia integraalilaskelmia ja muunnoksia. Tarkastellaanpa yhtä järjestelmistä, joka on suosittu itseoppineiden käsityöläisten tai niiden keskuudessa, jotka haluavat vain käyttää vanhaa pesukoneen moottoria.
Kaikki kriteerimme täyttää harjatun moottorin pyörimisnopeuden säätöpiiri, joka on koottu erikoistuneeseen TDA 1085 -mikropiiriin. Tämä on täysin valmis ohjain moottoreiden ohjaamiseen, jonka avulla voit säätää nopeutta nollasta maksimiarvoon , varmistaen vääntömomentin ylläpidon takogeneraattorin avulla.
Suunnitteluominaisuuksia
 Mikropiiri on varustettu kaikella, mitä tarvitaan korkealaatuiseen moottorin ohjaukseen eri nopeustiloissa, jarrutuksesta kiihdytykseen ja pyörimiseen enimmäisnopeudella. Siksi sen käyttö yksinkertaistaa suunnittelua huomattavasti ja tekee samalla kaiken yleiskäyttöinen veto, koska voit valita minkä tahansa nopeuden vakiovääntömomentilla akselille ja käyttää sitä paitsi kuljetinhihnan tai porakoneen käyttövoimana, myös pöydän siirtämiseen.
Mikropiiri on varustettu kaikella, mitä tarvitaan korkealaatuiseen moottorin ohjaukseen eri nopeustiloissa, jarrutuksesta kiihdytykseen ja pyörimiseen enimmäisnopeudella. Siksi sen käyttö yksinkertaistaa suunnittelua huomattavasti ja tekee samalla kaiken yleiskäyttöinen veto, koska voit valita minkä tahansa nopeuden vakiovääntömomentilla akselille ja käyttää sitä paitsi kuljetinhihnan tai porakoneen käyttövoimana, myös pöydän siirtämiseen.
Mikropiirin ominaisuudet löytyvät viralliselta verkkosivustolta. Osoitamme tärkeimmät ominaisuudet, joita tarvitaan muuntimen rakentamiseen. Näitä ovat: integroitu taajuus-jännite-muunnospiiri, kiihtyvyysgeneraattori, pehmokäynnistin, Tacho-signaalinkäsittely-yksikkö, virranrajoitusmoduuli jne. Kuten näet, piiri on varustettu useilla suojauksilla, jotka varmistavat säätimen vakaan toiminnan eri tiloissa.
Alla olevassa kuvassa on tyypillinen piirikaavio mikropiirin kytkemiseksi.
Kaava on yksinkertainen, joten se on täysin toistettavissa omin käsin. On joitakin ominaisuuksia, jotka sisältävät raja-arvot ja nopeudensäätömenetelmän:

Jos sinun on järjestettävä moottorin peruutus, sinun on tätä varten täydennettävä piiri käynnistimellä, joka vaihtaa virityskäämin suunnan. Tarvitset myös nollanopeuden ohjauspiirin peruutuksen luvan antamiseksi. Ei näy kuvassa.
Ohjausperiaate
Kun moottorin akselin pyörimisnopeus asetetaan vastuksella lähtöpiirissä 5, lähtöön muodostetaan pulssisarja triakin lukituksen avaamiseksi tietyssä kulmassa. Pyörimisnopeutta valvotaan takogeneraattorilla, joka tapahtuu digitaalisessa muodossa. Ohjain muuntaa vastaanotetut pulssit analogiseksi jännitteeksi, minkä vuoksi akselin nopeus stabiloituu yhteen arvoon kuormituksesta riippumatta. Jos takogeneraattorin jännite muuttuu, sisäinen säädin lisää triakin lähtöohjaussignaalin tasoa, mikä johtaa nopeuden kasvuun.
Mikropiiri voi ohjata kahta lineaarista kiihtyvyyttä, jolloin voit saavuttaa moottorilta vaaditun dynamiikan. Yksi niistä on asennettu piirin rampin 6 nastaan. Tätä säädintä käyttävät pesukonevalmistajat itse, joten sillä on kaikki edut kotikäyttöön. Tämä varmistetaan seuraavien lohkojen läsnäololla:

Käyttö samanlainen kaava tarjoaa täyden hallinnan kommutaattorimoottorille missä tahansa tilassa. Kiihdytyksen pakotetun ohjauksen ansiosta on mahdollista saavuttaa vaadittu kiihtyvyysnopeus tiettyyn pyörimisnopeuteen. Tällaista säädintä voidaan käyttää kaikissa nykyaikaisissa pesukonemoottoreissa, joita käytetään muihin tarkoituksiin.
Hyvää iltaa ystävät! Tämä on ensimmäinen arvioni mistään elämässäni, joten kuuntelen mielelläni kritiikkiä ja neuvoja.
Tavarat ostettiin omilla rahoilla. Yksityiskohdat alla.
Arvostettuni sai minut tilaamaan tämän säätimen kirich. Siksi tilasin ensin täsmälleen saman PWM-säätimen, mutta sitten vaihteeksi tilasin tämän päivän katsauksen sankarin.
Tilaus tehtiin 29. lokakuuta, mutta se saapui minulle vasta 3. joulukuuta Moskovan lähellä sijaitsevaan Lobnyaan. Tuote pakattiin tavalliseen kuplamuoviin pussiin ja käärittiin runsaasti vaahtoon:
Paketti

Sarja sisältää vain itse ohjauskortin ja 100 kOhmin säädettävän vastuksen, joka on kytketty suoraan levyyn HU-3-liittimellä, jonka johdon pituus on 19 cm, mikä on varsin kätevä asentaa.

Voimajälkien juottaminen tuntui minusta yksinkertaisesti kauhealta. En uskonut, että aasialaiset ystävämme säästäisivät juotteessa. Myös pesemättömän juoksutteen jälkiä on näkyvissä. Ehkä olen vain niin onnekas:


En esitä olevani juotosguru, joten päätin korjata tilannetta hieman. Luulen, että jos joku saisi maksun käteni jälkeen, hän ei eroaisi paljon kiinalaisista:


Säädin on rakennettu NE555P-ajastimeen, joten mielestäni ei ole järkevää puhua koko piiristä, ja pelkään, että minulla ei ole vielä tarpeeksi tietoa tähän =).

Käyttöjännitealue on 12-60 volttia ja maksimivirta 20 ampeeria. Muuten, yhdessä kuvista näet 20 ampeerin sulakkeen, jonka teoriassa pitäisi säästää nimellisvirran ylityksestä.
Tarkastetaan nyt sitä toiminnassa. Voimanlähteenä käytän vanhaa virtalähdettä kannettavasta tietokoneesta 19 voltilla ja 4,74 ampeerilla sekä moottoria jonkinlaisesta 18 voltin ruuvimeisselistä:

Video itse työstä. Pyydän anteeksi pientä tärinää, koska... Kuvasin sen puhelimellani, mutta minulla ei ole jalustaa tätä varten:
Ostaminen tai ostamatta jättäminen on jokaisen asia. Ostin tämän miniporakoneeseen, jonka toivon alkavan rakentaa ensi vuonna. Tietysti verkko on täynnä suunnitelmia tästä aiheesta, mutta toistaiseksi aloittelijana halusin valmiin ratkaisun.
Kiitos kaikille huomiostanne, odotan kommenttejanne!
Koten sijaan

Tätä tee-se-itse-piiriä voidaan käyttää nopeudensäätimenä 12V DC-moottorille, jonka teho on enintään 5A, tai himmentimenä 12V halogeeni- ja LED-lampuille 50W asti. Ohjaus suoritetaan pulssinleveysmodulaatiolla (PWM) pulssin toistotaajuudella noin 200 Hz. Luonnollisesti taajuutta voidaan muuttaa tarvittaessa, jolloin valitaan maksimaalinen vakaus ja tehokkuus.
Suurin osa näistä rakenteista kootaan paljon korkeammalla hinnalla. Tässä esittelemme kehittyneemmän version, joka käyttää 7555-ajastinta, bipolaaritransistoriohjainta ja tehokasta MOSFETiä. Tämä malli tarjoaa paremman nopeudenhallinnan ja toimii laajalla kuormitusalueella. Tämä on todellakin erittäin tehokas järjestelmä, ja sen osien kustannukset itsekokoonpanoa varten ostettaessa ovat melko alhaiset.
Piiri käyttää 7555-ajastinta noin 200 Hz:n säädettävän pulssinleveyden luomiseen. Se ohjaa transistoria Q3 (transistorien Q1 - Q2 kautta), joka ohjaa sähkömoottorin tai hehkulamppujen nopeutta.
![]()
![]()
Tälle piirille on monia sovelluksia, jotka saavat virran 12 V:sta: sähkömoottorit, tuulettimet tai lamput. Sitä voidaan käyttää autoissa, veneissä ja sähköajoneuvoissa, rautateiden mallissa ja niin edelleen.
![]()
12 V LED-lamput, esimerkiksi LED-nauhat, voidaan myös liittää turvallisesti tähän. Kaikki tietävät, että LED-lamput ovat paljon tehokkaampia kuin halogeeni- tai hehkulamput ja kestävät paljon pidempään. Ja tarvittaessa syötä PWM-ohjainta 24 voltista tai enemmän, koska itse puskurivaiheella varustetussa mikropiirissä on tehon stabilointi.



