ตัวควบคุมพีเอ็มดับเบิลยู การมอดูเลตความกว้างพัลส์ โครงการ ตัวควบคุมความเร็วสำหรับมอเตอร์สับเปลี่ยน: การออกแบบและการผลิตแบบ DIY แผนผังของตัวป้องกันการหมุนของเครื่องยนต์
วิธีที่ง่ายที่สุดในการควบคุมความเร็วในการหมุนของมอเตอร์กระแสตรงนั้นขึ้นอยู่กับการใช้การปรับความกว้างพัลส์ (PWM หรือ PWM) สาระสำคัญของวิธีนี้คือแรงดันไฟฟ้าจะจ่ายให้กับมอเตอร์ในรูปของพัลส์ ในกรณีนี้อัตราการเกิดซ้ำของพัลส์จะคงที่ แต่ระยะเวลาอาจแตกต่างกันไป
สัญญาณ PWM มีลักษณะเฉพาะด้วยพารามิเตอร์เช่นรอบการทำงานหรือรอบการทำงาน นี่คือส่วนกลับของรอบการทำงานและเท่ากับอัตราส่วนของระยะเวลาพัลส์ต่อคาบของมัน
D = (ที/ที) * 100%
รูปภาพด้านล่างแสดงสัญญาณ PWM ที่มีรอบการทำงานต่างกัน
ด้วยวิธีการควบคุมนี้ ความเร็วในการหมุนของมอเตอร์จะแปรผันตามรอบการทำงานของสัญญาณ PWM
วงจรควบคุมมอเตอร์กระแสตรงอย่างง่าย
วงจรควบคุมมอเตอร์กระแสตรงที่ง่ายที่สุดประกอบด้วยทรานซิสเตอร์เอฟเฟกต์สนาม ซึ่งมีเกตที่มาพร้อมกับสัญญาณ PWM ทรานซิสเตอร์ในวงจรนี้ทำหน้าที่เป็นสวิตช์อิเล็กทรอนิกส์ที่จะสลับขั้วหนึ่งของมอเตอร์ไปที่กราวด์ ทรานซิสเตอร์จะเปิดขึ้นในช่วงเวลาของพัลส์

เครื่องยนต์จะมีพฤติกรรมอย่างไรเมื่อเปิดเครื่องเช่นนี้? หากความถี่ของสัญญาณ PWM ต่ำ (หลาย Hz) มอเตอร์จะกระตุก สิ่งนี้จะสังเกตได้ชัดเจนเป็นพิเศษเมื่อมีรอบการทำงานเล็กน้อยของสัญญาณ PWM
ที่ความถี่หลายร้อย Hz มอเตอร์จะหมุนอย่างต่อเนื่อง และความเร็วในการหมุนจะเปลี่ยนไปตามสัดส่วนรอบการทำงาน พูดโดยคร่าวๆ เครื่องยนต์จะ "รับรู้" ค่าเฉลี่ยของพลังงานที่จ่ายให้
วงจรสำหรับสร้างสัญญาณ PWM
มีหลายวงจรสำหรับสร้างสัญญาณ PWM หนึ่งในวิธีที่ง่ายที่สุดคือวงจรที่ใช้ตัวจับเวลา 555 ต้องใช้ส่วนประกอบขั้นต่ำ ไม่ต้องตั้งค่าใดๆ และสามารถประกอบได้ภายในหนึ่งชั่วโมง
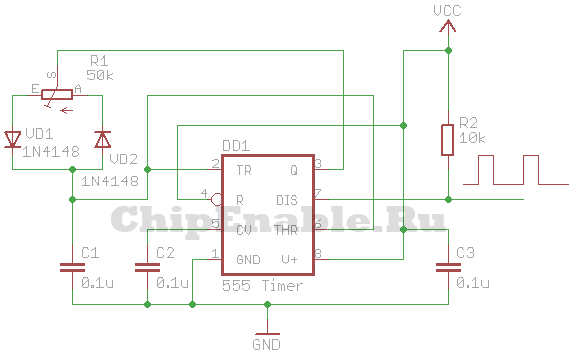
แรงดันไฟฟ้าของวงจร VCC สามารถอยู่ในช่วง 5 - 16 โวลต์ ไดโอดเกือบทุกชนิดสามารถใช้เป็นไดโอด VD1 - VD3 ได้
หากคุณสนใจที่จะทำความเข้าใจวิธีการทำงานของวงจรนี้ คุณต้องดูบล็อกไดอะแกรมของตัวจับเวลา 555 ตัวจับเวลาประกอบด้วยตัวแบ่งแรงดันไฟฟ้า ตัวเปรียบเทียบสองตัว ฟลิปฟล็อป สวิตช์โอเพ่นคอลเลคเตอร์ และบัฟเฟอร์เอาต์พุต

แหล่งจ่ายไฟ (VCC) และพินรีเซ็ตเชื่อมต่อกับแหล่งจ่ายไฟบวก เช่น +5 V และพินกราวด์ (GND) อยู่ที่เครื่องหมายลบ ตัวสะสมแบบเปิดของทรานซิสเตอร์ (พิน DISC) เชื่อมต่อกับแหล่งจ่ายไฟที่เป็นบวกผ่านตัวต้านทานและสัญญาณ PWM จะถูกลบออก ไม่ได้ใช้พิน CONT มีการเชื่อมต่อตัวเก็บประจุอยู่ พินตัวเปรียบเทียบ THRES และ TRIG ถูกรวมเข้าด้วยกันและเชื่อมต่อกับวงจร RC ที่ประกอบด้วยตัวต้านทานแบบปรับค่าได้ ไดโอดสองตัว และตัวเก็บประจุหนึ่งตัว พินกลางของตัวต้านทานปรับค่าได้เชื่อมต่อกับพิน OUT ขั้วปลายสุดของตัวต้านทานเชื่อมต่อผ่านไดโอดกับตัวเก็บประจุซึ่งเชื่อมต่อกับกราวด์ด้วยขั้วที่สอง ด้วยการรวมไดโอดเข้าด้วยกัน ตัวเก็บประจุจึงถูกชาร์จผ่านส่วนหนึ่งของตัวต้านทานแบบแปรผันและคายประจุผ่านอีกส่วนหนึ่ง
ในขณะที่เปิดเครื่องอยู่ OUT พินจะอยู่ในระดับลอจิคัลต่ำจากนั้นพิน THRES และ TRIG ต้องขอบคุณไดโอด VD2 ก็จะอยู่ในระดับต่ำเช่นกัน ตัวเปรียบเทียบด้านบนจะเปลี่ยนเอาต์พุตเป็นศูนย์และตัวเปรียบเทียบด้านล่างเป็นหนึ่ง เอาต์พุตของทริกเกอร์จะถูกตั้งค่าเป็นศูนย์ (เนื่องจากมีอินเวอร์เตอร์ที่เอาต์พุต) สวิตช์ทรานซิสเตอร์จะปิด และพิน OUT จะถูกตั้งค่าไว้ที่ระดับสูง (เนื่องจากมีอินเวอร์เตอร์ที่อินพุต) ถัดไปตัวเก็บประจุ C3 จะเริ่มชาร์จผ่านไดโอด VD1 เมื่อชาร์จถึงระดับหนึ่ง ตัวเปรียบเทียบที่ต่ำกว่าจะเปลี่ยนเป็นศูนย์ จากนั้นตัวเปรียบเทียบด้านบนจะเปลี่ยนเอาต์พุตเป็นหนึ่ง เอาต์พุตทริกเกอร์จะถูกตั้งค่าเป็นระดับเอกภาพ สวิตช์ทรานซิสเตอร์จะเปิดขึ้น และพิน OUT จะถูกตั้งค่าไว้ที่ระดับต่ำ ตัวเก็บประจุ C3 จะเริ่มคายประจุผ่านไดโอด VD2 จนกว่าจะหมดประจุ และผู้เปรียบเทียบจะเปลี่ยนทริกเกอร์เป็นสถานะอื่น วงจรจะเกิดซ้ำ
ความถี่โดยประมาณของสัญญาณ PWM ที่สร้างโดยวงจรนี้สามารถคำนวณได้โดยใช้สูตรต่อไปนี้:
F = 1.44/(R1*C1), [เฮิร์ตซ์]
โดยที่ R1 อยู่ในหน่วยโอห์ม C1 อยู่ในหน่วยฟารัด
ด้วยค่าที่ระบุในแผนภาพด้านบน ความถี่ของสัญญาณ PWM จะเท่ากับ:
เอฟ = 1.44/(50000*0.0000001) = 288 เฮิรตซ์
ตัวควบคุมความเร็วมอเตอร์กระแสตรงแบบ PWM
ลองรวมสองวงจรที่นำเสนอข้างต้นเข้าด้วยกัน และเราจะได้วงจรควบคุมความเร็วมอเตอร์กระแสตรงอย่างง่าย ซึ่งสามารถใช้เพื่อควบคุมความเร็วเครื่องยนต์ของของเล่น หุ่นยนต์ สว่านขนาดเล็ก ฯลฯ
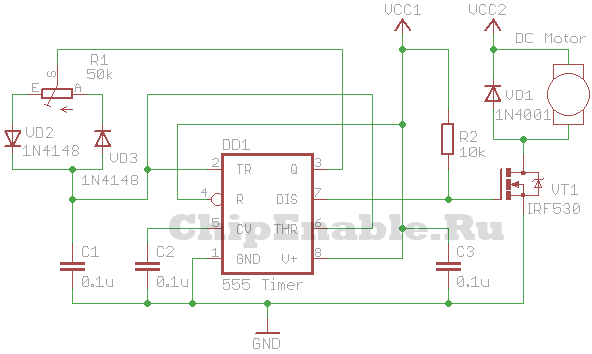
VT1 เป็นทรานซิสเตอร์เอฟเฟกต์สนามชนิด n ที่สามารถทนต่อกระแสมอเตอร์สูงสุดที่แรงดันไฟฟ้าและโหลดเพลาที่กำหนด VCC1 คือ 5 ถึง 16 V, VCC2 มากกว่าหรือเท่ากับ VCC1
แทนที่จะใช้ทรานซิสเตอร์สนามแม่เหล็ก คุณสามารถใช้ทรานซิสเตอร์แบบไบโพลาร์ n-p-n ทรานซิสเตอร์ดาร์ลิงตัน หรือออปโตรีเลย์ที่มีกำลังที่เหมาะสมได้
การทำงานของเครื่องยนต์ราบรื่น ไม่มีกระตุกหรือไฟกระชากเป็นกุญแจสำคัญในความทนทาน เพื่อควบคุมตัวบ่งชี้เหล่านี้ ตัวควบคุมความเร็วมอเตอร์ไฟฟ้าใช้สำหรับ 220V, 12V และ 24V ความถี่ทั้งหมดเหล่านี้สามารถทำได้ด้วยมือของคุณเองหรือคุณสามารถซื้อหน่วยสำเร็จรูปได้
ทำไมคุณต้องมีตัวควบคุมความเร็ว?
ตัวควบคุมความเร็วรอบเครื่องยนต์ซึ่งเป็นตัวแปลงความถี่เป็นอุปกรณ์ที่มีทรานซิสเตอร์ทรงพลังซึ่งจำเป็นในการกลับแรงดันไฟฟ้าตลอดจนเพื่อให้แน่ใจว่าการหยุดและสตาร์ทมอเตอร์แบบอะซิงโครนัสอย่างราบรื่นโดยใช้ PWM PWM – การควบคุมพัลส์กว้างของอุปกรณ์ไฟฟ้า มันถูกใช้เพื่อสร้างไซนัสอยด์เฉพาะของกระแสสลับและกระแสตรง
รูปภาพ - ตัวควบคุมอันทรงพลังสำหรับมอเตอร์แบบอะซิงโครนัสตัวอย่างที่ง่ายที่สุดของตัวแปลงคือตัวปรับแรงดันไฟฟ้าแบบธรรมดา แต่อุปกรณ์ที่อยู่ระหว่างการสนทนานั้นมีช่วงการทำงานและพลังงานที่กว้างกว่ามาก
ตัวแปลงความถี่ใช้ในอุปกรณ์ใดๆ ที่ใช้พลังงานไฟฟ้า Governors ให้การควบคุมมอเตอร์ไฟฟ้าที่แม่นยำอย่างยิ่ง เพื่อให้สามารถปรับความเร็วของเครื่องยนต์ขึ้นหรือลงได้ รักษารอบให้อยู่ในระดับที่ต้องการ และปกป้องเครื่องมือจากการหมุนอย่างกะทันหัน ในกรณีนี้ มอเตอร์ไฟฟ้าจะใช้พลังงานที่จำเป็นในการทำงานเท่านั้น แทนที่จะใช้งานอย่างเต็มกำลัง
 รูปภาพ - ตัวควบคุมความเร็วมอเตอร์กระแสตรง
รูปภาพ - ตัวควบคุมความเร็วมอเตอร์กระแสตรง ทำไมคุณถึงต้องใช้ตัวควบคุมความเร็วสำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัส:
- เพื่อประหยัดพลังงาน ด้วยการควบคุมความเร็วของมอเตอร์ความนุ่มนวลของการสตาร์ทและหยุดความแรงและความถี่ของการปฏิวัติคุณสามารถประหยัดเงินส่วนบุคคลได้อย่างมาก ตัวอย่างเช่น การลดความเร็วลง 20% อาจส่งผลให้ประหยัดพลังงานได้ 50%
- ตัวแปลงความถี่สามารถใช้เพื่อควบคุมอุณหภูมิกระบวนการ ความดัน หรือโดยไม่ต้องใช้ตัวควบคุมแยกต่างหาก
- ไม่จำเป็นต้องมีตัวควบคุมเพิ่มเติมสำหรับการสตาร์ทแบบนุ่มนวล
- ค่าบำรุงรักษาลดลงอย่างมาก
อุปกรณ์นี้มักใช้กับเครื่องเชื่อม (ส่วนใหญ่เป็นเครื่องกึ่งอัตโนมัติ), เตาไฟฟ้า, เครื่องใช้ในครัวเรือนจำนวนหนึ่ง (เครื่องดูดฝุ่น, จักรเย็บผ้า, วิทยุ, เครื่องซักผ้า), เครื่องทำความร้อนในบ้าน, เรือรุ่นต่างๆ ฯลฯ
หลักการทำงานของตัวควบคุมความเร็ว
ตัวควบคุมความเร็วเป็นอุปกรณ์ที่ประกอบด้วยระบบย่อยหลักสามระบบดังต่อไปนี้:
- มอเตอร์กระแสสลับ;
- ตัวควบคุมไดรฟ์หลัก
- ไดรฟ์และชิ้นส่วนเพิ่มเติม
เมื่อมอเตอร์ AC สตาร์ทเต็มกำลัง กระแสจะถูกถ่ายโอนด้วยกำลังเต็มของโหลด โดยทำซ้ำ 7-8 ครั้ง กระแสไฟฟ้านี้จะทำให้ขดลวดมอเตอร์โค้งงอและก่อให้เกิดความร้อนที่จะถูกสร้างขึ้นเป็นเวลานาน ซึ่งสามารถลดอายุการใช้งานของเครื่องยนต์ได้อย่างมาก กล่าวอีกนัยหนึ่งตัวแปลงเป็นอินเวอร์เตอร์แบบสเต็ปที่ให้การแปลงพลังงานเป็นสองเท่า
 รูปภาพ - ไดอะแกรมของตัวควบคุมสำหรับมอเตอร์สับเปลี่ยน
รูปภาพ - ไดอะแกรมของตัวควบคุมสำหรับมอเตอร์สับเปลี่ยน ตัวควบคุมความถี่ของความเร็วของมอเตอร์ไฟฟ้าสามเฟสหรือเฟสเดียวจะแก้ไขกระแส 220 หรือ 380 โวลต์ทั้งนี้ขึ้นอยู่กับแรงดันไฟฟ้าขาเข้า การกระทำนี้ดำเนินการโดยใช้ไดโอดเรียงกระแสซึ่งอยู่ที่อินพุตพลังงาน จากนั้นกระแสจะถูกกรองโดยใช้ตัวเก็บประจุ ถัดไปจะสร้าง PWM วงจรไฟฟ้าจะรับผิดชอบในเรื่องนี้ ตอนนี้ขดลวดของมอเตอร์เหนี่ยวนำพร้อมที่จะส่งสัญญาณพัลส์และรวมเข้ากับคลื่นไซน์ที่ต้องการ แม้จะมีมอเตอร์ไมโครอิเล็กทริก แต่สัญญาณเหล่านี้ก็ยังถูกส่งออกมาเป็นชุด
 รูปภาพ - ไซน์ซอยด์ของการทำงานปกติของมอเตอร์ไฟฟ้า
รูปภาพ - ไซน์ซอยด์ของการทำงานปกติของมอเตอร์ไฟฟ้า วิธีการเลือกตัวควบคุม
มีคุณสมบัติหลายประการที่คุณต้องเลือกตัวควบคุมความเร็วสำหรับรถยนต์ มอเตอร์ไฟฟ้าของเครื่องจักร หรือความต้องการในครัวเรือน:
- ประเภทการควบคุม สำหรับมอเตอร์สับเปลี่ยนจะมีตัวควบคุมที่มีระบบควบคุมแบบเวกเตอร์หรือสเกลาร์ แบบแรกมักใช้บ่อยกว่า แต่แบบหลังถือว่ามีความน่าเชื่อถือมากกว่า
- พลัง. นี่เป็นหนึ่งในปัจจัยที่สำคัญที่สุดในการเลือกตัวแปลงความถี่ไฟฟ้า จำเป็นต้องเลือกเครื่องกำเนิดความถี่ที่มีกำลังไฟที่สอดคล้องกับค่าสูงสุดที่อนุญาตบนอุปกรณ์ที่ได้รับการป้องกัน แต่สำหรับมอเตอร์แรงดันต่ำควรเลือกตัวควบคุมที่ทรงพลังกว่าค่าวัตต์ที่อนุญาตจะดีกว่า
- แรงดันไฟฟ้า. โดยธรรมชาติแล้วทุกอย่างที่นี่เป็นรายบุคคล แต่ถ้าเป็นไปได้คุณจะต้องซื้อตัวควบคุมความเร็วสำหรับมอเตอร์ไฟฟ้าซึ่งมีแผนภาพวงจรที่มีแรงดันไฟฟ้าที่อนุญาตได้หลากหลาย
- ช่วงความถี่ การแปลงความถี่เป็นงานหลักของอุปกรณ์นี้ ดังนั้นลองเลือกรุ่นที่เหมาะกับความต้องการของคุณมากที่สุด สมมติว่าสำหรับเราเตอร์แบบแมนนวล 1,000 เฮิรตซ์ก็เพียงพอแล้ว
- ตามลักษณะอื่น ๆ นี่คือระยะเวลาการรับประกัน จำนวนอินพุต ขนาด (สำหรับเครื่องเดสก์ท็อปและเครื่องมือช่าง จะมีเอกสารแนบพิเศษมาให้)
ในเวลาเดียวกันคุณต้องเข้าใจด้วยว่ามีสิ่งที่เรียกว่าตัวควบคุมการหมุนสากล นี่คือตัวแปลงความถี่สำหรับมอเตอร์แบบไร้แปรงถ่าน
 รูปภาพ – ไดอะแกรมตัวควบคุมสำหรับมอเตอร์ไร้แปรงถ่าน
รูปภาพ – ไดอะแกรมตัวควบคุมสำหรับมอเตอร์ไร้แปรงถ่าน วงจรนี้มีสองส่วน ส่วนแรกเป็นตรรกะ โดยที่ไมโครคอนโทรลเลอร์อยู่บนชิป และส่วนที่สองคือกำลัง โดยพื้นฐานแล้ววงจรไฟฟ้าดังกล่าวใช้สำหรับมอเตอร์ไฟฟ้ากำลังสูง
วิดีโอ: ตัวควบคุมความเร็วมอเตอร์ไฟฟ้าพร้อม SHIRO V2
วิธีทำตัวควบคุมความเร็วรอบเครื่องยนต์แบบโฮมเมด
คุณสามารถสร้างตัวควบคุมความเร็วมอเตอร์ triac อย่างง่ายได้โดยมีแผนภาพแสดงด้านล่างและราคาประกอบด้วยชิ้นส่วนที่ขายในร้านขายอุปกรณ์ไฟฟ้าเท่านั้น
ในการทำงานเราจำเป็นต้องมี triac อันทรงพลังประเภท BT138-600 แนะนำโดยนิตยสารวิศวกรรมวิทยุ
 รูปภาพ - ไดอะแกรมตัวควบคุมความเร็วที่ต้องทำด้วยตัวเอง
รูปภาพ - ไดอะแกรมตัวควบคุมความเร็วที่ต้องทำด้วยตัวเอง ในวงจรที่อธิบาย ความเร็วจะถูกปรับโดยใช้โพเทนชิออมิเตอร์ P1 พารามิเตอร์ P1 กำหนดเฟสของสัญญาณพัลส์ขาเข้า ซึ่งจะเปิดไตรแอค โครงการนี้สามารถใช้ได้ทั้งในการทำนาและที่บ้าน คุณสามารถใช้ตัวควบคุมนี้กับจักรเย็บผ้า พัดลม เครื่องเจาะแบบตั้งโต๊ะ
หลักการทำงานนั้นง่าย: ในขณะที่มอเตอร์ช้าลงเล็กน้อย ความเหนี่ยวนำจะลดลง และสิ่งนี้จะเพิ่มแรงดันไฟฟ้าใน R2-P1 และ C3 ซึ่งจะนำไปสู่การเปิด triac อีกต่อไป
ตัวควบคุมการตอบสนองของไทริสเตอร์ทำงานแตกต่างออกไปเล็กน้อย ช่วยให้พลังงานไหลกลับเข้าสู่ระบบพลังงานซึ่งประหยัดและเป็นประโยชน์อย่างมาก อุปกรณ์อิเล็กทรอนิกส์นี้เกี่ยวข้องกับการรวมไทริสเตอร์อันทรงพลังไว้ในวงจรไฟฟ้า แผนภาพของเขามีลักษณะดังนี้:

ในการจ่ายกระแสตรงและวงจรเรียงกระแส จำเป็นต้องมีเครื่องกำเนิดสัญญาณควบคุม เครื่องขยายสัญญาณ ไทริสเตอร์ และวงจรรักษาความเร็ว
ในการทำงานหลายประเภทกับไม้ โลหะ หรือวัสดุประเภทอื่นๆ ไม่จำเป็นต้องใช้ความเร็วสูง แต่ต้องมีแรงฉุดลากที่ดี มันจะถูกต้องกว่าถ้าพูด - ช่วงเวลานั้น ต้องขอบคุณเขาที่ทำให้งานที่วางแผนไว้สามารถสำเร็จได้อย่างมีประสิทธิภาพและมีการสูญเสียพลังงานน้อยที่สุด เพื่อจุดประสงค์นี้ มอเตอร์กระแสตรง (หรือมอเตอร์สับเปลี่ยน) ถูกใช้เป็นอุปกรณ์ขับเคลื่อน ซึ่งแรงดันไฟฟ้าจะถูกแก้ไขโดยตัวเครื่องเอง จากนั้นเพื่อให้ได้คุณลักษณะด้านประสิทธิภาพที่ต้องการ จำเป็นต้องปรับความเร็วของมอเตอร์สับเปลี่ยนโดยไม่สูญเสียกำลัง
คุณสมบัติของการควบคุมความเร็ว
สิ่งสำคัญคือต้องรู้ว่า เครื่องยนต์แต่ละตัวใช้อะไรเมื่อหมุนไม่เพียงแต่แอคทีฟเท่านั้น แต่ยังรวมถึงพลังงานรีแอคทีฟด้วย ในกรณีนี้ระดับพลังงานปฏิกิริยาจะสูงขึ้นซึ่งเนื่องมาจากลักษณะของโหลด ในกรณีนี้ งานในการออกแบบอุปกรณ์สำหรับควบคุมความเร็วในการหมุนของมอเตอร์สับเปลี่ยนคือการลดความแตกต่างระหว่างกำลังงานและกำลังไฟฟ้ารีแอกทีฟ ดังนั้นตัวแปลงดังกล่าวจะค่อนข้างซับซ้อนและไม่ใช่เรื่องง่ายที่จะทำด้วยตัวเอง
คุณสามารถสร้างรูปร่างหน้าตาของตัวควบคุมได้ด้วยมือของคุณเอง แต่ไม่มีประเด็นใดที่จะพูดถึงเรื่องการประหยัดพลังงาน อำนาจคืออะไร? ในแง่ไฟฟ้า มันคือกระแสที่ดึงคูณด้วยแรงดันไฟฟ้า ผลลัพธ์จะให้ค่าที่แน่นอนซึ่งรวมถึงส่วนประกอบที่ใช้งานและปฏิกิริยา หากต้องการแยกเฉพาะส่วนที่ใช้งานอยู่นั่นคือเพื่อลดการสูญเสียให้เป็นศูนย์จำเป็นต้องเปลี่ยนลักษณะของโหลดให้ใช้งานอยู่ เฉพาะตัวต้านทานเซมิคอนดักเตอร์เท่านั้นที่มีคุณสมบัติเหล่านี้
เพราะฉะนั้น, จำเป็นต้องเปลี่ยนตัวเหนี่ยวนำด้วยตัวต้านทานแต่เป็นไปไม่ได้เพราะเครื่องยนต์จะเปลี่ยนเป็นอย่างอื่นและเห็นได้ชัดว่าจะไม่ทำให้สิ่งใดเคลื่อนไหว เป้าหมายของการควบคุมแบบไม่สูญเสียคือการรักษาแรงบิด ไม่ใช่กำลัง แต่จะยังคงเปลี่ยนแปลง มีเพียงตัวแปลงเท่านั้นที่สามารถรับมือกับงานดังกล่าวได้ซึ่งจะควบคุมความเร็วโดยการเปลี่ยนระยะเวลาของพัลส์เปิดของไทริสเตอร์หรือทรานซิสเตอร์กำลัง
วงจรควบคุมทั่วไป
 ตัวอย่างของคอนโทรลเลอร์ที่ใช้หลักการควบคุมมอเตอร์โดยไม่สูญเสียพลังงานคือตัวแปลงไทริสเตอร์ เหล่านี้เป็นวงจรรวมตามสัดส่วนป้อนกลับที่ให้ กฎระเบียบที่เข้มงวดลักษณะเฉพาะตั้งแต่การเร่งความเร็วและการเบรกไปจนถึงการถอยหลัง การควบคุมเฟสพัลส์ที่มีประสิทธิภาพมากที่สุด: อัตราการทำซ้ำของพัลส์ปลดล็อคจะถูกซิงโครไนซ์กับความถี่เครือข่าย สิ่งนี้ช่วยให้คุณรักษาแรงบิดได้โดยไม่เพิ่มการสูญเสียในส่วนประกอบที่เกิดปฏิกิริยา แผนภาพทั่วไปสามารถแสดงได้หลายช่วงตึก:
ตัวอย่างของคอนโทรลเลอร์ที่ใช้หลักการควบคุมมอเตอร์โดยไม่สูญเสียพลังงานคือตัวแปลงไทริสเตอร์ เหล่านี้เป็นวงจรรวมตามสัดส่วนป้อนกลับที่ให้ กฎระเบียบที่เข้มงวดลักษณะเฉพาะตั้งแต่การเร่งความเร็วและการเบรกไปจนถึงการถอยหลัง การควบคุมเฟสพัลส์ที่มีประสิทธิภาพมากที่สุด: อัตราการทำซ้ำของพัลส์ปลดล็อคจะถูกซิงโครไนซ์กับความถี่เครือข่าย สิ่งนี้ช่วยให้คุณรักษาแรงบิดได้โดยไม่เพิ่มการสูญเสียในส่วนประกอบที่เกิดปฏิกิริยา แผนภาพทั่วไปสามารถแสดงได้หลายช่วงตึก:
- วงจรเรียงกระแสควบคุมกำลัง
- หน่วยควบคุมวงจรเรียงกระแสหรือวงจรควบคุมเฟสพัลส์
- ข้อเสนอแนะของ tachogenerator;
- ชุดควบคุมกระแสไฟฟ้าในขดลวดมอเตอร์
ก่อนที่จะเจาะลึกอุปกรณ์และหลักการควบคุมที่แม่นยำยิ่งขึ้น จำเป็นต้องตัดสินใจเกี่ยวกับประเภทของมอเตอร์สับเปลี่ยน รูปแบบการควบคุมสำหรับลักษณะการทำงานจะขึ้นอยู่กับสิ่งนี้
ประเภทของมอเตอร์คอมมิวเตเตอร์
รู้จักมอเตอร์สับเปลี่ยนอย่างน้อยสองประเภท อุปกรณ์แรกประกอบด้วยอุปกรณ์ที่มีกระดองและขดลวดกระตุ้นที่สเตเตอร์ ส่วนที่สองประกอบด้วยอุปกรณ์ที่มีเกราะและแม่เหล็กถาวร นอกจากนี้ยังจำเป็นต้องตัดสินใจจำเป็นต้องออกแบบตัวควบคุมเพื่อจุดประสงค์ใด:

การออกแบบมอเตอร์
โครงสร้างเครื่องยนต์จากเครื่องซักผ้า Indesit นั้นเรียบง่าย แต่เมื่อออกแบบคอนโทรลเลอร์เพื่อควบคุมความเร็วจำเป็นต้องคำนึงถึงพารามิเตอร์ด้วย มอเตอร์อาจมีลักษณะเฉพาะที่แตกต่างกัน ซึ่งเป็นเหตุผลว่าทำไมการควบคุมจึงเปลี่ยนไปด้วย โหมดการทำงานยังถูกนำมาพิจารณาด้วยซึ่งจะเป็นตัวกำหนดการออกแบบของตัวแปลง โครงสร้างมอเตอร์สับเปลี่ยนประกอบด้วย จากส่วนประกอบดังต่อไปนี้
- กระดองนั้นมีขดลวดวางอยู่ในร่องของแกนกลาง
- Collector ซึ่งเป็นวงจรเรียงกระแสเชิงกลของแรงดันไฟหลักกระแสสลับซึ่งถูกส่งไปยังขดลวด
- สเตเตอร์พร้อมขดลวดสนาม จำเป็นต้องสร้างสนามแม่เหล็กคงที่ซึ่งกระดองจะหมุน
 เมื่อกระแสในวงจรมอเตอร์ที่เชื่อมต่อตามวงจรมาตรฐานเพิ่มขึ้น ขดลวดสนามจะเชื่อมต่อแบบอนุกรมกับกระดอง ด้วยการรวมนี้ เรายังเพิ่มสนามแม่เหล็กที่กระทำต่อกระดอง ซึ่งช่วยให้เราสามารถบรรลุคุณสมบัติเชิงเส้นตรงได้ หากสนามยังคงไม่เปลี่ยนแปลง ก็จะยากขึ้นที่จะได้รับไดนามิกที่ดี ไม่ต้องพูดถึงการสูญเสียพลังงานจำนวนมาก ควรใช้มอเตอร์ดังกล่าวที่ความเร็วต่ำเนื่องจากสะดวกกว่าในการควบคุมด้วยการเคลื่อนไหวแบบแยกส่วนขนาดเล็ก
เมื่อกระแสในวงจรมอเตอร์ที่เชื่อมต่อตามวงจรมาตรฐานเพิ่มขึ้น ขดลวดสนามจะเชื่อมต่อแบบอนุกรมกับกระดอง ด้วยการรวมนี้ เรายังเพิ่มสนามแม่เหล็กที่กระทำต่อกระดอง ซึ่งช่วยให้เราสามารถบรรลุคุณสมบัติเชิงเส้นตรงได้ หากสนามยังคงไม่เปลี่ยนแปลง ก็จะยากขึ้นที่จะได้รับไดนามิกที่ดี ไม่ต้องพูดถึงการสูญเสียพลังงานจำนวนมาก ควรใช้มอเตอร์ดังกล่าวที่ความเร็วต่ำเนื่องจากสะดวกกว่าในการควบคุมด้วยการเคลื่อนไหวแบบแยกส่วนขนาดเล็ก
ด้วยการจัดการควบคุมการกระตุ้นและกระดองแยกกัน ทำให้สามารถกำหนดตำแหน่งเพลามอเตอร์ได้แม่นยำสูง แต่วงจรควบคุมจะซับซ้อนมากขึ้นอย่างมาก ดังนั้นเราจะมาดูคอนโทรลเลอร์ให้ละเอียดยิ่งขึ้นซึ่งช่วยให้คุณเปลี่ยนความเร็วในการหมุนจาก 0 เป็นค่าสูงสุด แต่ไม่มีการวางตำแหน่ง นี่อาจมีประโยชน์หากเครื่องเจาะเต็มเปี่ยมที่มีความสามารถในการตัดเกลียวจะทำจากเครื่องยนต์ของเครื่องซักผ้า
การเลือกโครงการ
เมื่อทราบเงื่อนไขทั้งหมดที่จะใช้มอเตอร์แล้วคุณสามารถเริ่มผลิตตัวควบคุมความเร็วสำหรับมอเตอร์สับเปลี่ยนได้ คุณควรเริ่มต้นด้วยการเลือกรูปแบบที่เหมาะสมที่จะให้คุณสมบัติและความสามารถที่จำเป็นทั้งหมดแก่คุณ คุณควรจำไว้:
- การควบคุมความเร็วตั้งแต่ 0 ถึงสูงสุด
- ให้แรงบิดที่ดีในช่วงความเร็วต่ำ
- ควบคุมความเร็วได้อย่างราบรื่น
เมื่อดูแผนการต่างๆ บนอินเทอร์เน็ต เราสามารถสรุปได้ว่ามีคนไม่กี่คนที่สร้าง "หน่วย" ดังกล่าว เนื่องจากความซับซ้อนของหลักการควบคุม เนื่องจากจำเป็นต้องจัดระเบียบการควบคุมพารามิเตอร์หลายตัว มุมเปิดของไทริสเตอร์ ระยะเวลาพัลส์ควบคุม เวลาเร่งความเร็ว-ลดความเร็ว อัตราการเพิ่มขึ้นของแรงบิด ฟังก์ชันเหล่านี้ได้รับการจัดการโดยวงจรบนตัวควบคุมที่ทำการคำนวณและการแปลงอินทิกรัลที่ซับซ้อน ลองพิจารณารูปแบบหนึ่งซึ่งเป็นที่นิยมในหมู่ช่างฝีมือที่เรียนรู้ด้วยตนเองหรือผู้ที่ต้องการใช้มอเตอร์เก่าจากเครื่องซักผ้าให้เกิดประโยชน์
เกณฑ์ทั้งหมดของเราเป็นไปตามวงจรสำหรับควบคุมความเร็วในการหมุนของมอเตอร์แบบมีแปรงซึ่งประกอบบนวงจรไมโคร TDA 1085 แบบพิเศษ นี่คือไดรเวอร์สำเร็จรูปสำหรับควบคุมมอเตอร์ที่ให้คุณปรับความเร็วได้ตั้งแต่ 0 ถึงค่าสูงสุด ทำให้มั่นใจได้ถึงการรักษาแรงบิดด้วยการใช้เครื่องกำเนิดไฟฟ้ากระแสสลับ
คุณสมบัติการออกแบบ
 วงจรไมโครมีทุกสิ่งที่จำเป็นสำหรับการควบคุมเครื่องยนต์คุณภาพสูงในโหมดความเร็วต่างๆ ตั้งแต่การเบรกไปจนถึงการเร่งความเร็วและการหมุนด้วยความเร็วสูงสุด ดังนั้นการใช้งานจึงทำให้การออกแบบง่ายขึ้นอย่างมากในขณะเดียวกันก็ทำทุกอย่างไปพร้อมๆ กัน ไดรฟ์สากลเนื่องจากคุณสามารถเลือกความเร็วใดก็ได้ด้วยแรงบิดคงที่บนเพลา และไม่เพียงแต่ใช้เป็นตัวขับเคลื่อนสำหรับสายพานลำเลียงหรือเครื่องเจาะเท่านั้น แต่ยังใช้ในการเคลื่อนย้ายโต๊ะอีกด้วย
วงจรไมโครมีทุกสิ่งที่จำเป็นสำหรับการควบคุมเครื่องยนต์คุณภาพสูงในโหมดความเร็วต่างๆ ตั้งแต่การเบรกไปจนถึงการเร่งความเร็วและการหมุนด้วยความเร็วสูงสุด ดังนั้นการใช้งานจึงทำให้การออกแบบง่ายขึ้นอย่างมากในขณะเดียวกันก็ทำทุกอย่างไปพร้อมๆ กัน ไดรฟ์สากลเนื่องจากคุณสามารถเลือกความเร็วใดก็ได้ด้วยแรงบิดคงที่บนเพลา และไม่เพียงแต่ใช้เป็นตัวขับเคลื่อนสำหรับสายพานลำเลียงหรือเครื่องเจาะเท่านั้น แต่ยังใช้ในการเคลื่อนย้ายโต๊ะอีกด้วย
ลักษณะของไมโครวงจรสามารถพบได้บนเว็บไซต์อย่างเป็นทางการ เราจะระบุคุณสมบัติหลักที่จำเป็นในการสร้างตัวแปลง ซึ่งรวมถึง: วงจรแปลงความถี่เป็นแรงดันไฟฟ้าในตัว, เครื่องกำเนิดความเร่ง, ชุดซอฟต์สตาร์ท, หน่วยประมวลผลสัญญาณ Tacho, โมดูลจำกัดกระแส ฯลฯ อย่างที่คุณเห็นวงจรนี้มีการป้องกันหลายอย่างซึ่งจะช่วยให้การทำงานของตัวควบคุมมีเสถียรภาพในโหมดต่างๆ
รูปด้านล่างแสดงแผนภาพวงจรทั่วไปสำหรับการเชื่อมต่อไมโครวงจร
รูปแบบนี้เรียบง่ายดังนั้นจึงสามารถทำซ้ำได้ด้วยมือของคุณเอง มีคุณสมบัติบางอย่างที่มีค่าขีดจำกัดและวิธีการควบคุมความเร็ว:

หากคุณต้องการจัดระเบียบมอเตอร์แบบย้อนกลับคุณจะต้องเสริมวงจรด้วยสตาร์ทเตอร์ที่จะเปลี่ยนทิศทางของขดลวดกระตุ้น คุณจะต้องมีวงจรควบคุมความเร็วเป็นศูนย์เพื่อให้อนุญาตให้ถอยหลังได้ ไม่แสดงในภาพ.
หลักการควบคุม
เมื่อความเร็วการหมุนของเพลามอเตอร์ถูกกำหนดโดยตัวต้านทานในวงจรเอาต์พุต 5 ลำดับของพัลส์จะถูกสร้างขึ้นที่เอาต์พุตเพื่อปลดล็อคไทรแอกในมุมที่แน่นอน ความเร็วของการหมุนจะถูกตรวจสอบโดยเครื่องกำเนิดไฟฟ้ากระแสสลับซึ่งเกิดขึ้นในรูปแบบดิจิทัล ไดรเวอร์จะแปลงพัลส์ที่ได้รับให้เป็นแรงดันไฟฟ้าแบบอะนาล็อก ซึ่งเป็นเหตุผลว่าทำไมความเร็วของเพลาจึงมีความเสถียรที่ค่าเดียว โดยไม่คำนึงถึงโหลด หากแรงดันไฟฟ้าจากเครื่องกำเนิดไฟฟ้ากระแสสลับเปลี่ยนไปตัวควบคุมภายในจะเพิ่มระดับสัญญาณควบคุมเอาต์พุตของไทรแอคซึ่งจะทำให้ความเร็วเพิ่มขึ้น
วงจรไมโครสามารถควบคุมความเร่งเชิงเส้นได้ 2 ระดับ ทำให้คุณบรรลุไดนามิกที่ต้องการจากเครื่องยนต์ หนึ่งในนั้นติดตั้งอยู่บนขา Ramp 6 ของวงจร- ผู้ผลิตเครื่องซักผ้าใช้ตัวควบคุมนี้เองดังนั้นจึงมีข้อดีทั้งหมดที่จะใช้เพื่อวัตถุประสงค์ในบ้าน มั่นใจได้ด้วยการมีอยู่ของบล็อกต่อไปนี้:

การใช้งาน โครงการที่คล้ายกันให้การควบคุมมอเตอร์คอมมิวเตเตอร์ได้เต็มรูปแบบในทุกโหมด ด้วยการควบคุมการเร่งความเร็วแบบบังคับ ทำให้สามารถบรรลุความเร็วเร่งความเร็วที่ต้องการตามความเร็วการหมุนที่กำหนดได้ ตัวควบคุมดังกล่าวสามารถใช้กับมอเตอร์เครื่องซักผ้าสมัยใหม่ทั้งหมดที่ใช้เพื่อวัตถุประสงค์อื่น
สวัสดีตอนเย็นเพื่อน! นี่เป็นการรีวิวสิ่งใดในชีวิตครั้งแรก ดังนั้นฉันจึงยินดีรับฟังคำวิจารณ์และคำแนะนำ
สินค้าถูกซื้อด้วยเงินของตัวเอง รายละเอียดด้านล่าง
ฉันได้รับแจ้งให้สั่งหน่วยงานกำกับดูแลนี้โดยผู้เคารพของฉัน คีริช- ดังนั้นก่อนอื่นฉันจึงสั่งตัวควบคุม PWM แบบเดียวกันทุกประการ แต่จากนั้นเพื่อการเปลี่ยนแปลงฉันได้สั่งฮีโร่ของการรีวิววันนี้
คำสั่งซื้อดังกล่าวเกิดขึ้นเมื่อวันที่ 29 ตุลาคม แต่มาถึงฉันที่ Lobnya ใกล้มอสโกเมื่อวันที่ 3 ธันวาคมเท่านั้น สินค้าบรรจุในถุงมาตรฐานพร้อมแผ่นบับเบิ้ลและห่อด้วยโฟมอย่างไม่อั้น:
บรรจุุภัณฑ์

ชุดประกอบด้วยเฉพาะบอร์ดควบคุมและตัวต้านทานผันแปร 100 kOhm ซึ่งเชื่อมต่อโดยตรงกับบอร์ดโดยใช้ขั้วต่อ HU-3 ที่มีความยาวสายไฟ 19 ซม. ซึ่งค่อนข้างสะดวกในการติดตั้ง

การบัดกรีร่องรอยพลังงานดูเหมือนแย่มากสำหรับฉัน ฉันไม่คิดว่าเพื่อนชาวเอเชียของเราจะละเลยการบัดกรี นอกจากนี้ยังมีร่องรอยของฟลักซ์ที่ไม่ได้ล้างอยู่มากมายที่มองเห็นได้ บางทีฉันอาจเป็นผู้ชายที่โชคดี:


ฉันไม่ได้แกล้งทำเป็นกูรูด้านการบัดกรีดังนั้นฉันจึงตัดสินใจแก้ไขสถานการณ์เล็กน้อย ฉันคิดว่าถ้าใครได้รับเงินจากมือของฉัน พวกเขาคงไม่ต่างจากคนจีนมากนัก:


ตัวควบคุมถูกสร้างขึ้นบนตัวจับเวลา NE555P ดังนั้นฉันคิดว่ามันไม่สมเหตุสมผลที่จะพูดถึงวงจรทั้งหมด และฉันเกรงว่าฉันยังไม่มีความรู้เพียงพอสำหรับเรื่องนี้ =)

ช่วงแรงดันไฟฟ้าขณะใช้งานคือ 12-60 โวลต์ และกระแสสูงสุดคือ 20 แอมป์ อย่างไรก็ตามในรูปถ่ายหนึ่งที่คุณเห็นฟิวส์ขนาด 20 แอมแปร์ซึ่งตามทฤษฎีแล้วจะช่วยให้คุณประหยัดจากกระแสไฟฟ้าเกินพิกัดได้
ตอนนี้เรามาตรวจสอบการทำงานกัน สำหรับพลังงานฉันจะใช้แหล่งจ่ายไฟเก่าจากแล็ปท็อปที่มี 19 โวลต์และ 4.74 แอมป์และมอเตอร์จากไขควงบางชนิดที่มี 18 โวลต์:

วีดีโอผลงานตัวเอง. ฉันขอโทษที่ทำให้สั่นเล็กน้อย เพราะว่า... ฉันถ่ายมันด้วยโทรศัพท์ แต่ไม่มีขาตั้งกล้องสำหรับสิ่งนี้:
จะซื้อหรือไม่เป็นธุรกิจของทุกคน ฉันซื้อเครื่องนี้มาใช้กับเครื่องเจาะขนาดเล็กซึ่งหวังว่าจะเริ่มสร้างได้ในปีหน้า แน่นอนว่าเครือข่ายเต็มไปด้วยแผนการในหัวข้อนี้ แต่ตอนนี้ในฐานะผู้เริ่มต้น ฉันต้องการโซลูชันสำเร็จรูป
ขอขอบคุณทุกท่านที่ให้ความสนใจ ฉันหวังว่าจะแสดงความคิดเห็นของคุณ!
แทนที่จะเป็นโกเต้

วงจร DIY นี้สามารถใช้เป็นตัวควบคุมความเร็วสำหรับมอเตอร์ DC 12V ที่มีอัตรากระแสไฟสูงถึง 5A หรือใช้เป็นเครื่องหรี่ไฟสำหรับหลอดฮาโลเจน 12V และหลอด LED สูงถึง 50W การควบคุมดำเนินการโดยใช้การปรับความกว้างพัลส์ (PWM) ที่อัตราการเกิดซ้ำของพัลส์ประมาณ 200 เฮิรตซ์ โดยปกติแล้ว ความถี่สามารถเปลี่ยนแปลงได้หากจำเป็น โดยเลือกเพื่อความเสถียรและประสิทธิภาพสูงสุด
โครงสร้างเหล่านี้ส่วนใหญ่ประกอบขึ้นด้วยต้นทุนที่สูงกว่ามาก เรานำเสนอเวอร์ชันขั้นสูงเพิ่มเติมซึ่งใช้ตัวจับเวลา 7555 ไดรเวอร์ทรานซิสเตอร์แบบไบโพลาร์ และ MOSFET อันทรงพลัง การออกแบบนี้ให้การควบคุมความเร็วที่ดีขึ้นและทำงานในช่วงโหลดที่กว้าง นี่เป็นรูปแบบที่มีประสิทธิภาพมากและต้นทุนของชิ้นส่วนเมื่อซื้อเพื่อประกอบเองค่อนข้างต่ำ
วงจรใช้ตัวจับเวลา 7555 เพื่อสร้างความกว้างพัลส์ที่แปรผันได้ประมาณ 200 Hz ควบคุมทรานซิสเตอร์ Q3 (ผ่านทรานซิสเตอร์ Q1 - Q2) ซึ่งควบคุมความเร็วของมอเตอร์ไฟฟ้าหรือหลอดไฟ
![]()
![]()
มีการใช้งานหลายอย่างสำหรับวงจรนี้ที่จะใช้พลังงานจาก 12V: มอเตอร์ไฟฟ้า พัดลม หรือโคมไฟ สามารถใช้ในรถยนต์ เรือ และยานพาหนะไฟฟ้า ในรถไฟจำลองและอื่นๆ
![]()
สามารถเชื่อมต่อหลอดไฟ LED 12 V เช่น แถบ LED ได้ที่นี่อย่างปลอดภัย ทุกคนรู้ดีว่าหลอดไฟ LED มีประสิทธิภาพมากกว่าหลอดฮาโลเจนหรือหลอดไส้และมีอายุการใช้งานนานกว่ามาก และหากจำเป็นให้จ่ายไฟให้กับคอนโทรลเลอร์ PWM ตั้งแต่ 24 โวลต์ขึ้นไปเนื่องจากตัวไมโครวงจรเองที่มีสเตจบัฟเฟอร์นั้นมีตัวปรับกำลังไฟ



