AC დაბალი სიხშირის ფილტრი ორი დინამიკის წრე. აქტიური სამზოლიანი ფილტრი NM2116-ზე დაფუძნებული. L- ფორმის სიხშირის ფილტრები კონდენსატორზე და ინდუქტორზე
თითქმის ყველა თანამედროვე მაღალი ხარისხის დინამიკის სისტემა არის მრავალსაფეხურიანი, ანუ შედგება რამდენიმე დინამიკისგან, რომელთაგან თითოეული მუშაობს საკუთარი სიხშირის დიაპაზონში. ეს გამოწვეულია იმით, რომ პრაქტიკულად შეუძლებელია ისეთი დინამიური დინამიკის შექმნა, რომელიც უზრუნველყოფს გამოსხივებას სიხშირეების ფართო დიაპაზონში დამახინჯების დაბალი დონით (პირველ რიგში, ინტერმოდულაცია, ასევე გარდამავალი, არაწრფივი და ა.შ.) და ფართო დირექტიულობით. დამახასიათებელი. ამიტომ, აკუსტიკური სისტემებში (როგორც პროფესიონალურ, ასევე საყოფაცხოვრებო) გამოიყენება რამდენიმე დინამიკი (დაბალი სიხშირის, საშუალო სიხშირის, მაღალი სიხშირის, ზოგჯერ სუპერ მაღალი სიხშირის) და ელექტრული იზოლაციის ფილტრები შედის ხმის სიგნალის ენერგიის გასანაწილებლად. მათ შორის.
კროსვორდის ფილტრების გავლენა აკუსტიკური სისტემების მახასიათებლების ფორმირებაზე წინა წლებში არ იყო შეფასებული: მათ მხოლოდ დინამიკების ოპერაციული სიხშირის დიაპაზონის გარეთ სიგნალის შესუსტების როლი მიენიჭათ. თუმცა, Hi-Fi დინამიკების სისტემების ტექნოლოგიის განვითარებამ აიძულა გადაგვეხედა კროსოვერის ფილტრების როლი დინამიკების სისტემებში და მათი დიზაინის მეთოდოლოგია. მრავალრიცხოვანმა თეორიულმა და ექსპერიმენტულმა ნაშრომმა, რომელიც ეძღვნებოდა კროსვორდის ფილტრების გავლენას ემიტერების მახასიათებლების კორექტირებაზე და აკუსტიკური სისტემების ობიექტური და სუბიექტური მახასიათებლების ფორმირებაზე, გვაფიქრებინა კროსოვერის ფილტრები, როგორც აკუსტიკური სისტემების ერთ-ერთი ყველაზე მნიშვნელოვანი კომპონენტი. რომლის დახმარებით შესაძლებელია მრავალი საჭირო ელექტროაკუსტიკური მახასიათებლის სინთეზირება და მნიშვნელოვანი პროგრესის მიღწევა ბგერის ბუნებრიობის უზრუნველსაყოფად.
სანამ აკუსტიკური სისტემებში გამოყენებული სხვადასხვა ტიპის ფილტრების ანალიზსა და მათი გამოთვლის მეთოდებზე გადავიდეთ, მოდით ვისაუბროთ ფილტრების ძირითადი პარამეტრების განსაზღვრაზე.
ფილტრის პარამეტრები
ფილტრიარის მოწყობილობა, რომელიც გადასცემს გარკვეულ სპექტრულ კომპონენტებს სიგნალში და არ გადასცემს (ასუსტებს) დანარჩენს. ფილტრი შეიძლება განხორციელდეს როგორც ანალოგური წრე (პასიური და აქტიური ფილტრები), ან განხორციელდეს პროგრამულ უზრუნველყოფაში ან ციფრულ მოწყობილობაში (ციფრული ფილტრები).
თანამედროვე დინამიკების სისტემები იყენებენ როგორც პასიურ, ასევე აქტიურ ფილტრებს (კროსოვერები). პირველები ჩართულია თითოეულ არხში საერთო გამაძლიერებლის შემდეგ, მეორეები ჩართულია გამაძლიერებლის წინ. კავშირის ზოგადი დიაგრამა ნაჩვენებია ნახ. 1-ში. აქტიურ ფილტრებს აქვთ მრავალი უპირატესობა პასიურ ფილტრებთან შედარებით, რადგან მათი დარეგულირება ბევრად უფრო ადვილია, შეიძლება განხორციელდეს სხვადასხვა გზით, არ არის ენერგიის დანაკარგები და ა.შ. თუმცა, აქტიური ფილტრები ჩამორჩება პასიურ ფილტრებს ისეთ პარამეტრებში, როგორიცაა დინამიური დიაპაზონი. არაწრფივი დამახინჯება, ხმაურის დონე და ა.შ. აქტიური ფილტრების დიზაინის მეთოდები ფართოდ არის გაშუქებული სპეციალიზებულ ლიტერატურაში, ამიტომ აქ ყურადღებას გავამახვილებთ მხოლოდ პასიური ფილტრების დიზაინის მეთოდებზე, რომლებიც ფართოდ გამოიყენება თანამედროვე აკუსტიკური სისტემებში.
ძირითადი პარამეტრები, რომლებიც განსაზღვრავს ფილტრების თვისებებს, არის:
- გამტარუნარიანობა— სიხშირის დიაპაზონი, რომელშიც ფილტრები გადიან სიგნალს;
- დაკავების ჩიხი— სიხშირის დიაპაზონი, სადაც ფილტრები მნიშვნელოვნად ახშობენ სიგნალს;
- შეწყვეტის სიხშირე ვ cf არის სიხშირე, რომლის დროსაც სიგნალი ასუსტებს 3 დბ-ით საშუალო დონის გამშვებ ზოლში.
გამშვები ზოლის და გაჩერების მოწყობის ხასიათიდან გამომდინარე, ფილტრები იყოფა ოთხ ძირითად ტიპად.
დაბალი გამშვები ფილტრები(LPF) გადის დაბალი სიხშირის კომპონენტებს სიგნალის სპექტრში (ნულიდან ათვლის სიხშირემდე) და თრგუნავს მაღალი სიხშირის კომპონენტებს. გამოიყენება დაბალი სიხშირის დინამიკებისთვის. სიხშირის პასუხის ფორმა ნაჩვენებია ნახ. 2.
მაღალი გამშვები ფილტრები(HPF) გადის მაღალი სიხშირის კომპონენტებს (გათიშვის სიხშირიდან და ზემოთ) და თრგუნავს დაბალი სიხშირის კომპონენტებს. გამოიყენება მაღალი სიხშირის დინამიკებისთვის. სიხშირის პასუხის ფორმა ნაჩვენებია ნახ. 2.
გამტარი ფილტრები(PF) გაივლის გარკვეული სიხშირის ზოლებს (საიდან ვოთხ 1-მდე ვср2) და თრგუნავს ქვედა და მაღალ სიხშირეებს. გამოიყენება საშუალო სიხშირის დინამიკებისთვის, ნახ. 2.

ასევე არსებობს ჭრილიფილტრები, რომლებიც წარმოადგენს დაბალი გამტარი და მაღალგამტარი ფილტრების ერთობლიობას. ისინი ახშობენ სიგნალის სპექტრულ კომპონენტებს სიხშირის გარკვეულ დიაპაზონში და გადასცემენ სხვა ზოლებში. ისინი ზოგჯერ გამოიყენება აკუსტიკურ სისტემებში ინდივიდუალური მწვერვალების ამოსაჭრელად და სიხშირის პასუხში.
გარდა ამისა, თითოეულ ჩამოთვლილ ფილტრს ახასიათებს შემდეგი პარამეტრები: სიხშირის პასუხის დახრილობა ზოლიდან გაჩერებაზე გადასვლისას, უთანასწორობა ზოლსა და გაჩერების ზოლში, რეზონანსული სიხშირე და ხარისხის ფაქტორი (Q). ფილტრის სტრუქტურისა და მასში შემავალი ელემენტების რაოდენობის მიხედვით, შეიძლება უზრუნველყოფილი იყოს სიხშირეზე რეაგირების შემცირების სხვადასხვა ფერდობები. როგორც წესი, აკუსტიკური სისტემები იყენებენ ფილტრებს 12 დბ/ოქტ, 18 დბ/ოქტ და 24 დბ/ოქტ (ნახ. 3), რომლებსაც შესაბამისად მეორე, მესამე და მეოთხე რიგის ფილტრებს უწოდებენ.

მეორე რიგის LC დაბალი გამტარი ფილტრის უმარტივესი სტრუქტურა ნაჩვენებია ნახ. 4. იგი მოიცავს შემდეგ ელემენტებს: ინდუქციურობა L, რომლის რეაქტიულობა სიხშირის პირდაპირპროპორციულია (XL = 2πfL) და ტევადობა C, რომლის რეაქტიულობა სიხშირის უკუპროპორციულია (XC = 1/2πfC). ამიტომ, ნაჩვენებია ნახ. 4a წრე გადის დაბალ სიხშირეებს (რადგან ინდუქციური წინააღმდეგობა L მცირეა დაბალ სიხშირეებზე) და უზრუნველყოფს მაღალი სიხშირეების შესუსტებას. მაღალგამტარ ფილტრს აქვს შებრუნებული სტრუქტურა (ნახ. 4ბ) და, შესაბამისად, გადის მაღალ სიხშირეებს და აყოვნებს დაბალს.

მეორე რიგის მაღალგამტარი ფილტრების სიხშირის პასუხის ტიპი ხარისხის ფაქტორის სხვადასხვა მნიშვნელობებისთვის ნაჩვენებია ნახ. 5. ასეთი ფილტრის რეზონანსული სიხშირე განისაზღვრება როგორც f=1/(LC)1/2, ხოლო ხარისხის ფაქტორი Q = [(R2C)/L]1/2.
მდებარეობა ნახ. 5 ჩანს, რომ ხარისხის ფაქტორის მნიშვნელობის ცვლილებები ცვლის სიხშირეზე პასუხის შემცირების ხასიათს გლუვიდან (Q = 0,707) დაცემამდე რეზონანსული სიხშირის ზრდით (Q = 1).
მეცნიერთა სახელებიდან გამომდინარე, რომლებმაც მათემატიკურად აღწერეს ფილტრების გადაცემის ფუნქციები (ანუ მათი სიხშირის მახასიათებლების ფორმები), მათ მიიღეს სხვადასხვა სახელები: ხარისხის ფაქტორი Q = 1 ფილტრებს უწოდებენ ჩებიშევის ფილტრებს, Q = 0.707 - ბუტერვორტს, Q = 0,58 - ბესელი, Q = 0,49 - ლინვიც-რიელი. თითოეულ ამ ტიპის ფილტრს აქვს თავისი დადებითი და უარყოფითი მხარეები.

გადაცემის ფუნქცია
ფილტრის გადაცემის ფუნქცია გაგებულია, როგორც რთული ძაბვის ამპლიტუდის თანაფარდობა ფილტრის გამომავალზე რთული ძაბვის ამპლიტუდის შეყვანისას. როგორც წესი, ფიზიკურად რეალიზებადი და სტაბილური წრფივი სქემების გადაცემის ფუნქციები აღწერილია მათემატიკური ფორმულების სახით, რომელთა მნიშვნელებია შემდეგი ფორმის გამოსახულებები (პოლინომები): Gn(s) = ansn+a n-1sn-1+…… .+a1s+1. ფილტრის რიგი განისაზღვრება რთული სიხშირის n სიმძლავრით, რომელიც დაკავშირებულია ჩვეულებრივ წრიულ სიხშირესთან, როგორც s = jω. (ჯ რაოდენობას წარმოსახვითი ერთეული ეწოდება). A კოეფიციენტების ტიპის არჩევით განისაზღვრება, ეკუთვნის თუ არა ფილტრები Butterworth, Chebyshev და ა.შ.. მაგალითად, სხვადასხვა რიგის ბატერვორტის პოლინომები აქვს B1 (s) = (1+s) ფორმა; B2 (s) = (1+1.414s+s2) და ა.შ.
აკუსტიკურ სისტემებში ფილტრების არჩევის პრობლემას ართულებს ის ფაქტი, რომ აუცილებელია სამი ან ორი (დამოკიდებულია ზოლების რაოდენობაზე) ერთი და იმავე ან განსხვავებული რიგის ფილტრების ტიპის არჩევა, რაც დინამიკებთან ერთად უზრუნველყოფს აკუსტიკური სისტემის საერთო მახასიათებლები (როგორიცაა ამპლიტუდა-სიხშირის პასუხი, ფაზა-სიხშირის მახასიათებელი - ფაზის პასუხი, ჯგუფის დაყოვნების დრო - ჯგუფის დაყოვნება და ა.შ.) საჭირო პარამეტრებით ეფექტურად რეპროდუცირებადი სიხშირის დიაპაზონში.
ფილტრის შექმნის ისტორია
კროსვორდის ფილტრების შექმნის ისტორია ერთდროულად იწყება მრავალსაფეხურიანი დინამიკის სისტემების მოსვლასთან ერთად. ერთ-ერთი პირველი თეორია შეიმუშავეს 30-იან წლებში ინჟინრებმა G. A. Campbell-მა და O. J. Zobel-მა Bell Labs-იდან (აშშ). პირველი პუბლიკაციები თარიღდება იმავე პერიოდით, მათი ავტორები K. Hilliard და H. Kimball მუშაობდნენ Metro Goldwin Meyer-ის ხმის განყოფილებაში. 1936 წელს მათი სტატია „დინამიკის იზოლაციის ფილტრები“ გამოქვეყნდა აკადემიის კვლევითი საბჭოს ტექნიკური ბიულეტენის 1936 წლის მარტის ნომერში. 1941 წლის იანვარში კ.ჰილიარმა ასევე გამოაქვეყნა "დინამიკის იზოლაციის ფილტრები" Electronics Magazine-ში, რომელიც შეიცავდა ყველა საჭირო ფორმულას პირველი და მესამე რიგის ბატერვორტის სქემების შესაქმნელად (როგორც პარალელური, ასევე სერიული სქემებისთვის). 1950-იანი წლებისთვის ბუტერვორტის ფილტრები აღიარებულ იქნა, როგორც არჩევის ფილტრები დინამიკების განცალკევების მიზნით. ამავდროულად, 60-იან წლებში ჯ.რ. ეშლიმ და რ. სმოლმა პირველად აღწერეს "ყოვლისმომცველი" ფილტრის სქემების, ასევე ხაზოვანი ფაზის სქემების თვისებები.
სტატია „ფილტრის სქემები და მოდულაციის დამახინჯება“ (R. Small-ის მიერ), გამოქვეყნებული JAES-ში 1971 წელს, მიეძღვნა რაოდენობრივი კავშირის გარკვევას ზოლის გარეთ მყოფი ფილტრებით შემოტანილ შესუსტებასა და ინტერმოდულაციის დამახინჯების რაოდენობას შორის გადახურვის დინამიკის გამო. ბენდები. მან აჩვენა, რომ მინიმალური შესუსტების მნიშვნელობა უნდა იყოს 12 dB/ოქტ, რათა თავიდან აიცილოს დამახინჯება გადახურვის ზოლში. ამავდროულად, ეშლიმ და ლ.მ. ჰენემ გამოიკვლიეს მესამე რიგის ბატერვორტის ფილტრების „ყოვლისმომცველი“ და „ფაზის თანმიმდევრული“ თვისებები. 1976 წელს S. Linkwitz-მა შეისწავლა პოლარული გამოსხივების ნიმუში ორმხრივი სისტემებისთვის, დისტანციური დრაივერებით და დარწმუნდა, რომ დინამიკის სისტემები Linkwitz-Riehle კროსოვერის ფილტრებით უზრუნველყოფენ მის სიმეტრიას.
ცოტა მოგვიანებით, პ. გარდემ მისცა სრული აღწერა ყველა სავალი ფილტრებისა და მათი ჯიშების შესახებ. თავისი იდეების გამოყენებით, დ. ფინკმა, ე. ლონგთან თანამშრომლობით, შეიმუშავა მეთოდი ხმის დინამიკის თავების ჰორიზონტალური (ანუ სიღრმის) გადაადგილების კორექტირების აკუსტიკური სისტემებში ფილტრში დაყოვნების ხაზების შეყვანით. ფილტრაციის თეორიაში მნიშვნელოვანი წვლილი შეიტანეს W. Marshall-Leach-მა და R. Bullock-მა, რომლებმაც პირველად შემოიტანეს ფილტრების ოპტიმიზაციის კონცეფცია ტიპისა და რიგის მიხედვით, ორი ღერძის გასწვრივ თავების გადაადგილების გათვალისწინებით. ამ სამუშაოების გაგრძელებაში რ. ბალოკმა აღწერა სამზოლიანი სიმეტრიული ფილტრების თვისებები და დაამტკიცა, რომ სამზოლიანი ფილტრის სისტემა არ შეიძლება მიღებულ იქნეს როგორც ორზოლიანი ფილტრების მარტივი კომბინაცია, პოპულარული რწმენის საწინააღმდეგოდ. S. Lipshitz და J. Vanderkooy სტატიების სერიაში განიხილეს მინიმალური ფაზის მახასიათებლების მქონე ფილტრების აგების სხვადასხვა ვარიანტები.
კროსვორდის ფილტრებით მრავალზოლიანი აკუსტიკური სისტემების კვლევისა და დიზაინის ახალი ეტაპი დაიწყო HORT, CACD, CALSOB, Filter Designer, LEAP 4.0 და ა.შ. პროგრამების საფუძველზე გამოთვლების აქტიური კომპიუტერიზაციის დაწყებით.
ბოლო დრომდე აკუსტიკური სისტემებში კროსვორდის ფილტრების დაპროექტება პრაქტიკულად საცდელი და შეცდომით ხდებოდა. ეს აიხსნება იმით, რომ გასული წლების ყველა თეორიული ნაშრომი, რომელიც მიეძღვნა აკუსტიკური სისტემებში კროსვორდის ფილტრების გაანგარიშებას, ეფუძნებოდა იმ პირობას, რომ თავად დინამიკები იდეალური იყო. ამა თუ იმ ტიპის კროსვორდის ფილტრების თვისებების გაანალიზებისას და მათი გავლენის გათვალისწინებით დინამიკების სისტემების მახასიათებლებზე, უგულებელყოფილი იყო დინამიკების მიმართულების თვისებები და მათი ფიზიკური განლაგების პირობები დინამიკის სისტემის კორპუსში. ითვლებოდა, რომ დინამიკებს აქვთ ბრტყელი სიხშირის პასუხი, არ ახდენენ ფაზურ ცვლას რეპროდუცირებულ სიგნალში და აქვთ აქტიური შეყვანის წინაღობა. ზემოაღნიშნულის შედეგად, დეველოპერები ხშირად ხვდებოდნენ იმ ფაქტს, რომ კროსვორდის ფილტრები, რომლებიც უზრუნველყოფენ საჭირო მახასიათებლებს იდეალიზებულ პირობებში, მიუღებელი აღმოჩნდა რეალურ დინამიკებთან მუშაობისას, რომლებსაც აქვთ საკუთარი ამპლიტუდა-სიხშირის და ფაზის სიხშირის დამახინჯება, რთული შეყვანის წინაღობა და მიმართულების თვისებები. ეს იყო მიზეზი გამყოფი ფილტრ-კორექტორების გამოთვლის ოპტიმიზაციის მეთოდების შექმნაზე მუშაობის გააქტიურების ბოლო წლებში.
კროსოვერის სიხშირეების შერჩევა
როგორც უკვე აღვნიშნეთ, გამყოფი ფილტრები მნიშვნელოვან გავლენას ახდენენ მრავალზოლიანი აკუსტიკური სისტემების ისეთ მახასიათებლებზე, როგორიცაა სიხშირის პასუხი, ფაზის პასუხი, ჯგუფის დაყოვნება, მიმართულების მახასიათებლები, შემავალი სიგნალის სიმძლავრის განაწილება ემიტერებს შორის, აკუსტიკური სისტემის შეყვანის წინაღობა და დონე. არაწრფივი დამახინჯების.
მრავალზოლიანი აკუსტიკური სისტემების კროსვორდის ფილტრების დიზაინის საწყისი ეტაპი საფუძვლიანია გადაკვეთის სიხშირეების შერჩევა (შეწყვეტის სიხშირეები)დაბალი სიხშირის, საშუალო სიხშირის და მაღალი სიხშირის არხები. გადაკვეთის სიხშირეების არჩევისას, ჩვეულებრივ გამოიყენება შემდეგი დაშვებები.
1. მაქსიმალურად ერთგვაროვანი მიმართულების მახასიათებლების უზრუნველყოფა, ანუ „ნახტომების“ არარსებობა რადიაციული შაბლონის სიგანეში დაბალი სიხშირიდან შუა სიხშირეზე და საშუალოდან მაღალსიხშირულ დინამიკებზე გადაადგილებისას, რადგან სიხშირეში რეგიონი, სადაც ისინი ერთად მუშაობენ, ფილტრის არარსებობის შემთხვევაში, რადიაციის ნიმუში მკვეთრად ვიწროვდება რადიაციული არეალის გაფართოების გამო.
2. დირექტიულობის მახასიათებლის სიგანის გლუვი ცვლილების შენარჩუნება (იმავე მიზეზით). ვცდილობთ, დინამიკები მაქსიმალურად ახლოს მოვათავსოთ ერთმანეთთან და ვერტიკალურ სიბრტყეში ერთმანეთზე დავაყენოთ (ეს თავიდან აიცილებს მიმართულების მახასიათებლების დამახინჯებას ჰორიზონტალურ სიბრტყეში, რადგან ეს უარყოფითად მოქმედებს სტერეო პანორამის რეპროდუქციაზე). თუ დინამიკებს შორის გადაკვეთის სიხშირისა და მანძილის არჩევა გავლენას ახდენს მიმართულების მახასიათებლის სიგანეზე, მაშინ გამოყოფილი სიხშირის არხების სიგნალების ფაზებისა და ამპლიტუდების თანაფარდობა გავლენას ახდენს სივრცეში მიმართულების მახასიათებლის ორიენტაციაზე. ფილტრების სხვადასხვა ტიპები, როგორც ქვემოთ იქნება ნაჩვენები, გავლენას ახდენენ სივრცეში დამახასიათებელი მიმართულების დახრილობაზე, გადაკვეთის სიხშირეების რეგიონში, სხვადასხვა ხარისხით.
3. დინამიკების სიხშირეზე პასუხის მწვერვალების შესუსტება და ჩავარდნები, რომლებიც წარმოიქმნება დიფუზორის მოძრაობის დგუშის ბუნების დაკარგვის გამო. ისინი ცდილობენ შეარჩიონ ფილტრების სიხშირეზე პასუხის ათვლის სიხშირე და დახრილობა დაბალი სიხშირის და საშუალო სიხშირის დინამიკებისთვის ისე, რომ პირველი რეზონანსული მწვერვალები და დაბლა დასუსტდეს არანაკლებ 20 დბ.
4. საშუალო და მაღალი სიხშირის დინამიკების მოძრავი სისტემების გადაადგილების ამპლიტუდის შეზღუდვა მათ მიერ გამოშვებული სპექტრის დაბალი სიხშირის ნაწილში (და, შესაბამისად, მიწოდებული სიმძლავრე) მათი მექანიკური და თერმული სიმტკიცით განსაზღვრული მნიშვნელობებით. , რაც ზრდის მათი მუშაობის საიმედოობას და ამცირებს არაწრფივი დამახინჯების დონეს. ეს ამოცანები რეგულირდება როგორც ათვლის სიხშირის არჩევით, ასევე ათვლის ფერდობის არჩევით, რომელიც უნდა იყოს მინიმუმ 12 დბ/ოქტ.
5. საჭირო ხმის წნევის დონის უზრუნველყოფა, რადგან მაღალი სიხშირის რეგიონში გამორთვის სიხშირის გაზრდით, გამოყენებული ძაბვის დონე შეიძლება გაიზარდოს, მაგალითად, მაღალი სიხშირის დინამიკზე (კონუსის გადაადგილების ამპლიტუდებიდან გამომდინარე მცირდება სიხშირის ზრდასთან ერთად). ეს საშუალებას გაძლევთ, შესაბამისად, გაზარდოთ ხმის წნევის დონე სიხშირის პასუხის მაღალი სიხშირის ნაწილში.
6. არაწრფივი დამახინჯების დონის შემცირება, კერძოდ, დოპლერის ეფექტის გამო (წარმოიქმნება სიგნალის დაბალი სიხშირის კომპონენტების მიერ მაღალი სიხშირის კომპონენტების მოდულირებისას).
როგორც წესი, გამორთვის სიხშირეები თანამედროვე სამმხრივ დინამიკებში არის დიაპაზონში: დაბალი სიხშირის დინამიკისთვის - 500...1000 ჰც, საშუალო სიხშირის დინამიკისთვის - 500...1000 ჰც-დან 5000-მდე.. .7000 ჰც, მაღალი სიხშირის დინამიკისთვის - 2000... 5000 ჰც.
გავლენა საერთო მახასიათებლებზე
მოსახერხებელია იზოლაციის ფილტრების გავლენის გაანალიზება მთლიანი სიხშირის პასუხის, ფაზის პასუხის და აკუსტიკური სისტემების სხვა მახასიათებლების ფორმირებაზე ზოგიერთი იდეალიზებული მოდელის გამოყენებით, რომელშიც ვარაუდობენ, რომ დინამიკებს აქვთ აქტიური წინაღობა და იდეალური მახასიათებლები (ბრტყელი სიხშირის პასუხი , ხაზოვანი ფაზის პასუხი, მუდმივი ფაზის ცვლა ემიტერებს შორის და ა.შ.) . ფილტრების გაანგარიშებისას ჯერ უნდა აირჩიოთ ათვლის სიხშირე (როგორც ადრე იყო ნაჩვენები), ფილტრის რიგი და ტიპი (Butterfort, Chebyshev, Linkwitz-Riehle და ა.შ.).
მიღებული საერთო მახასიათებლებიდან გამომდინარე, აკუსტიკური სისტემებში ჩვეულებრივ გამოყენებული ფილტრები შეიძლება დაიყოს სამ ჯგუფად: ხაზოვანი ფაზის ფილტრები (ფაზაში), სრულგამტარი ფილტრები და ყველა სხვა.
ხაზოვანი ფაზის ფილტრები (ფაზაში)უზრუნველყოს სიხშირეზე დამოუკიდებელი მთლიანი სიხშირის პასუხი, ხაზოვანი ფაზის პასუხი (უფრო ზუსტად, ნულის ტოლი ყველა სიხშირეზე), ასევე ჯგუფური დაყოვნება ნულის ტოლი. ამის მაგალითია პირველი რიგის Butterworth ფილტრები. ასეთი ფილტრებით ორმხრივი სისტემის საერთო მახასიათებლები ნაჩვენებია ნახ. 6. აკუსტიკურ სისტემებში მათი გამოყენების გამოცდილებამ აჩვენა, რომ მათ აქვთ მთელი რიგი უარყოფითი მხარეები: ცუდი სელექციურობა, სიგნალის სიმძლავრის მახასიათებლების დიდი უთანასწორობა, ცუდი მიმართულების მახასიათებლები ინტერფეისის ზოლში და ა.შ. ამიტომ ისინი ამჟამად არ გამოიყენება Hi- Fi დინამიკის სისტემები.

ყველა გამშვები ფილტრებიუზრუნველყოს ბრტყელი მთლიანი სიხშირის პასუხი, სიხშირეზე დამოკიდებული ფაზის პასუხი და ჯგუფის დაყოვნება. ფაზის პასუხის წრფივობის მოთხოვნები გადაჭარბებულია აკუსტიკური სისტემებისთვის - საკმარისია, რომ მათი ჯგუფის დაყოვნება იყოს მოსმენის ზღურბლზე ქვემოთ (როგორც გაზომვის შედეგები აჩვენებს, ამ ტიპის ფილტრები შემოაქვს ჯგუფური დაყოვნების დამახინჯებებს ინტერფეისის ზოლში, რომელიც აკმაყოფილებს ამ მოთხოვნებს). . ამ ტიპის ფილტრი მოიცავს ბუტერვორტის ფილტრებს ბუნდოვანი ბრძანებების და Linkwitz-Riehle ფილტრები ლუწი შეკვეთების. ამ შემთხვევაში, ფილტრების თვისებები რეალიზებულია არხების ჩართვის სხვადასხვა პოლარობით: 2, 6, 10 შეკვეთისთვის საჭიროა არხების ჩართვა ანტიფაზაში, 4, 8, 12 - არა. კენტი შეკვეთებისთვის: 1, 5, 9 ჩართული უნდა იყოს ფაზაში, 3.7... - ფაზაში. მეორე რიგის Linkwitz-Riehle-ისა და მესამე რიგის Butterworth ფილტრების საერთო და არხების მიხედვით მახასიათებლები ორარხიანი იდეალიზებული აკუსტიკური სისტემისთვის ნაჩვენებია ნახ. 7 და ნახ. 8. უნდა აღინიშნოს (მოგვიანებით იქნება ნაჩვენები), რომ ბუნდოვანი რიგის ფილტრები ქმნიან გადაკვეთის სიხშირის რეგიონში დამახასიათებელი დირექტიულობის ძირითადი წილის ბრუნვას.


არსებობს საკმაოდ დიდი კლასის ფილტრები, რომლებიც გამოიყენება აკუსტიკური სისტემებში, მაგრამ ისინი არ არიან „ყოვლისმომცველი“ ტიპის. ეს მოიცავს ბუტერვორტის მეორე და მეოთხე რიგის ფილტრებს, ბესელის მეორე და მეოთხე რიგის ფილტრებს, ლეჟანდრის, გაუსის მეოთხე რიგის ასიმეტრიული ფილტრების ჯგუფს და ა.შ. ისინი არ აძლევენ მთლიან ბრტყელ პასუხს, მაგრამ ეს ნაკლი შეიძლება ნაწილობრივ იყოს. შესწორებულია, თუ დინამიკებს შორის წყვეტის სიხშირეები არათანაბარი ხდება. მაგალითად, ნახ. სურათი 9a გვიჩვენებს მეოთხე რიგის ბუტერვორტის ფილტრის მახასიათებლებს, სიხშირეზე პასუხის პიკით 3 დბ 1000 ჰც-ის გადაკვეთის სიხშირეზე. თუ თქვენ გარკვეულწილად გამოყოფთ სიხშირეებს, ანუ გააკეთეთ გადაკვეთის სიხშირე დაბალი სიხშირეებისთვის 885 ჰც, ხოლო მაღალი სიხშირეებისთვის 1138 ჰც, მაშინ სიხშირის პასუხის პიკი ქრება (ნახ. 9ბ).


როგორც უკვე აღვნიშნეთ, დაბალი, საშუალო და მაღალი სიხშირის დინამიკებისთვის ფილტრის ტიპების არჩევანი, გარდა იმისა, რომ უზრუნველყოფილია ბრტყელი სიხშირის პასუხი კროსვორდის ზოლებში, განისაზღვრება იმ მოთხოვნით, რომ უზრუნველყოს მიმართულების მახასიათებლების სიმეტრიადინამიკის სისტემა.
თითოეული ფილტრის გამშვები ზოლის ფარგლებში, დინამიკის სისტემის მიმართულების მახასიათებელი განისაზღვრება თითოეული დინამიკის მიმართულების მახასიათებლით, მაგრამ ათვლის ზოლში (ფილტრის გადახურვის ზოლი), ისინი მუშაობენ ერთად, ანუ არის ორი ემიტერი (მაგალითად, საშუალო და მაღალი სიხშირის), რომლებიც განლაგებულია ერთმანეთისგან და მუშაობს იმავე კროსვორდის სიხშირით. ასეთი სისტემის მაგალითი ნაჩვენებია ნახ. 10. სიმარტივისთვის, ეს იყოს ორი იდენტური ემიტერი, რომელიც მუშაობს დგუშის რეჟიმში, იგივე მიმართულების მახასიათებლებით. OA ღერძზე, სიგნალები მოდის იმავე ფაზაში და ემატება. თუ შევაფასებთ ხმის წნევას OA ღერძზე", სადაც ფაზური ცვლა ერთი და მეორე დინამიკიდან გზაში სხვაობის გამო იქნება φ = π (ანუ 180 გრადუსი), მაშინ სიგნალები შეიკრიბება ანტიფაზაში და მიმართულების მახასიათებელში გამოჩნდება ჩაღრმავება. ღერძიდან შემდგომი გადანაცვლებით იმ წერტილებში, სადაც ფაზის სხვაობა არის 2π (ანუ 360 გრადუსი), კვლავ გამოჩნდება პიკი. ზოგადად, მიმართულების მახასიათებელს ექნება სამწლიანი. ხასიათი (სურ. 10).

გადაკვეთის სიხშირეზე დამახასიათებელი მიმართულების ძირითადი წილის სიგანე დამოკიდებულია დინამიკებს შორის მანძილის თანაფარდობაზე ტალღის სიგრძეზე, ხოლო წილის დახრილობა დამოკიდებულია გამოყოფილი არხების ამპლიტუდებისა და ფაზების თანაფარდობაზე, რაც არის ასევე განისაზღვრება არჩეული ფილტრების ტიპის მიხედვით.
ამ ფენომენის შესამცირებლად, თქვენ უნდა შეეცადოთ შეამციროთ მანძილი დინამიკებს შორის (მაგ. ფილტრი ხელს უწყობს საკუთარ სიხშირეზე დამოკიდებული ფაზის ცვლას.
მაგალითად, მესამე რიგის ბატერვორტის ტიპის ფილტრების გამოყენებისას, დირექტიულობის მახასიათებლის მთავარი წილის ბრუნავს ქვემოთ (როდესაც დინამიკები ჩართულია იმავე ფაზაში), ნახ. 11. როდესაც დინამიკები ჩართულია ანტიფაზაში (ანუ იცვლება მათი პოლარობა), დირექტიულობის მახასიათებლის წილი ღერძთან შედარებით მეორე მხარეს გადადის.

სხვადასხვა ტიპისა და რიგის ფილტრების ანალიზმა აჩვენა, რომ ლუწი რიგის ფილტრები (ყოვლისმომცველი ტიპის) არ ცვლის წილების მიმართულების სიმეტრიას, კენტი რიგის ფილტრები აბრუნებენ წილს ქვემოთ ან ზემოთ. სიმეტრიული მიმართულების მახასიათებლები უზრუნველყოფს გამოსხივებული აკუსტიკური სიმძლავრის უდიდეს ერთგვაროვნებას.
სიხშირის პასუხის გასწვრივ მიმართულების მახასიათებლებზე გავლენის გარდა, ფილტრებს შეუძლიათ გავლენა მოახდინონ ფაზა-სიხშირის მახასიათებლებზე და ჯგუფურ შეფერხებებზე ინტერფეისის დიაპაზონში. ანუ, გარდამავალი პროცესების ბუნება, მიუხედავად სიხშირეზე პასუხის სიმეტრიისა, შეიძლება განსხვავდებოდეს ერთი და იგივე გადაადგილების კუთხით ზედა და ქვედა ნახევარ სიბრტყეში, ხოლო ჯგუფის შეფერხებები, რომლებიც ღერძზე მოსმენის ზღურბლზე ქვემოთაა, შეიძლება აღემატებოდეს მოსმენას. ზღურბლები სივრცის სხვა წერტილებში, რითაც უარესდება ხმის ხარისხი.
კიდევ ერთხელ უნდა გავიხსენოთ, რომ ყველა გამოტანილი დასკვნა ეხება მხოლოდ დინამიკის იდეალური მახასიათებლების შემთხვევას. რეალური მახასიათებლები გათვალისწინებულია თანამედროვე კომპიუტერული პროგრამების გამოყენებით.
პასიური აკუსტიკური ფილტრების გაანგარიშება
პასიური აკუსტიკური ფილტრების გამოთვლის დაწყებისას, აუცილებელია მკაფიოდ განისაზღვროს სისტემის კონფიგურაცია (დაკვრის ზოლების რაოდენობა, დინამიკის თავების ტიპები და მათი პარამეტრები, დიზაინის ტიპი - კორპუსი), ასევე შეარჩიეთ ფილტრების რიგი და ტიპი, დამოკიდებულია ძირითადი ამოცანები, რომლებიც უნდა გადაწყდეს დიზაინის აკუსტიკური სისტემის დროს: ბრტყელი სიხშირის პასუხი, ხაზოვანი ფაზის პასუხი, სიმეტრიული მიმართულების მახასიათებელი და ა.შ.
იმის გამო, რომ დღესდღეობით აკუსტიკური სისტემები ყველაზე ხშირად იყენებენ "ყველა გავლის" ფილტრებს ბრტყელი სიხშირის პასუხით, ჩვენ მივცემთ ამ ტიპის ფილტრის სავარაუდო გაანგარიშებას (უფრო ზუსტი გამოთვლები ხორციელდება კომპიუტერული მეთოდების გამოყენებით).
პირველ რიგში, იზოლაციის ფილტრები გამოითვლება იმ პირობით, რომ ისინი დატვირთულია წმინდა აქტიური წინააღმდეგობით და იკვებება ძაბვის გენერატორით დაბალი გამომავალი წინააღმდეგობით. შემდეგ ყურადღება მიაქციეთ დინამიკის სიხშირეზე დამოკიდებული რთული დატვირთვის ეფექტების გათვალისწინებას.
გაანგარიშება იწყება ფილტრების რიგის დადგენით და პროტოტიპის ფილტრის ელემენტების გაანგარიშებით. პროტოტიპის ფილტრი არის კიბეების ტიპის ფილტრი, რომლის ელემენტები ნორმალიზებულია ერთეულის გათიშვის სიხშირეზე და ერთეული დატვირთვის მიმართ. შემდეგ დაბალი გამტარი ფილტრი გამოითვლება ფაქტობრივი ათვლის სიხშირეზე და ფაქტობრივ დატვირთვაზე და აქედან მაღალი გამტარი და გამტარი ფილტრის ელემენტები იპოვება სიხშირის კონვერტაციით.
პროტოტიპის ფილტრის ელემენტების ნორმალიზებული მნიშვნელობები პირველიდან მეექვსე რიგიდან ნაჩვენებია ცხრილში 1.

ამ ელემენტების მნიშვნელობები მოცემულია მხოლოდ ყველა გასასვლელი ფილტრებისთვის; სხვა ტიპის ფილტრებისთვის, ცხრილში ელემენტების მნიშვნელობები განსხვავებული იქნება. მეექვსე რიგის ფილტრის მიკროსქემის პროტოტიპი ნაჩვენებია ნახ. 12. ქვედა რიგის ფილტრები მიიღება შესაბამისი α ელემენტების გადაგდებით (დაწყებული ყველაზე დიდით).

რეალური ფილტრის პარამეტრების მნიშვნელობები მოცემული შეკვეთისთვის, დატვირთვის წინააღმდეგობა რ n (Ohm) და ათვლის სიხშირეები ვ i (Hz) განისაზღვრება შემდეგნაირად.
1. ამისთვის დაბალი გამტარი ფილტრი:
- თითოეული პროტოტიპის ინდუქციური α1, α3, α5 (ნახ. 12) ჩანაცვლებულია რეალური ინდუქციით ფორმულის მიხედვით L=αi Rн/2πf1, (1), სადაც i=1,3,5, f1 არის ათვლის სიხშირე. დაბალი გამტარი ფილტრი;
- თითოეული პროტოტიპის სიმძლავრე α2, α4, α6 ჩანაცვლებულია რეალური სიმძლავრით C=αi /2πf1Rн, (2) ფორმულის მიხედვით, სადაც i=2,4,6.
2. ამისთვის მაღალი გამტარი ფილტრი(გაანგარიშება ხდება პირიქით):
- თითოეული პროტოტიპის ინდუქციური α1, α3, α5 ჩანაცვლებულია რეალური ტევადობით C=1/2πf2Rναi, (3) სადაც i=1,3,5, f2 არის მაღალი გამტარი ფილტრის ათვლის სიხშირე;
- თითოეული პროტოტიპის ტევადობა ჩანაცვლებულია რეალური ინდუქციით L=Rн/2πf2αi, (4) სადაც i=2,4,6.
3. ამისთვის გამტარი ფილტრი:
- თითოეული პროტოტიპის ინდუქციური α1, α3, α5 ჩანაცვლებულია რეალური L- და C ელემენტების სერიით, გამოითვლება ფორმულების მიხედვით:
L=αiRн/2π(f2-f1),(5) С=1/4π2f02L,(6)
სად არის გამტარი ფილტრის საშუალო სიხშირე;
- თითოეული ტევადობის ელემენტი α2, α4, α6 ჩანაცვლებულია რეალური L- და C ელემენტების პარალელური წრედით, გამოითვლება ფორმულებით:
С=αi/2π(f2-f1)Rн,(7) L=1/4π2f02C.(8)
სამმხრივი დინამიკებისთვის განცალკევებული ფილტრების გაანგარიშების მაგალითი
გამოსათვლელად ვირჩევთ შემდეგ პარამეტრებს: მეორე რიგის ყოვლისმომცველი ფილტრები, ანუ პროტოტიპის ფილტრის წრე მოიცავს მხოლოდ α1, α2, Rн ელემენტებს (ნახ. 12). კროსვორდის სიხშირეები დაბალი სიხშირის და საშუალო სიხშირის არხებს შორის არის 500 ჰც, ხოლო საშუალო და მაღალი სიხშირის არხებს შორის არის 5000 ჰც. დინამიკის წინაღობა (DC): დაბალი სიხშირის და საშუალო სიხშირის Re = 8 Ohms, მაღალი სიხშირის Re = 16 Ohms. ელემენტების ნორმალიზებული პარამეტრების მნიშვნელობა განისაზღვრება ცხრილიდან. 1: α1=2.0, α2=0.5.
რეალური ელემენტების ღირებულებები დაბალი გამტარი ფილტრიჩვენ ვპოულობთ გამონათქვამებიდან (1) და (2):
L1LF = α1 Rн/2πf1 = 2.0∙8.0/(2∙3.14∙500) = 5.1 mH,
C1LF = α1 /2πf1Rн = 0.5/(2∙3.14∙500∙8.0) = 20 μF.
ელემენტის მნიშვნელობები გამტარი ფილტრი(საშუალო სიხშირის დინამიკისთვის) განისაზღვრება გამონათქვამების შესაბამისად (5)... (8):
L1SCH = α1Rн/2π(f2-f1) = 2.0∙8.0/2∙3.14 (5000 - 500) = 0.566 mH,
C1СЧ =1/4π2f02L = 1/4∙3.142∙5000∙500∙5.66∙10-4= 18 μF,
С2СЧ = α2/2π(f2-f1) Rn = 0.5/2∙3.14 (5000–500) ∙8.0 = 2.2 μF,
L2СЧ=1/4π2f02C2СЧ = 1/4∙3,142∙5000∙500∙2,2∙I0-6 = 4,6 mH.
ელემენტის მნიშვნელობები მაღალი გამტარი ფილტრიგანისაზღვრება გამონათქვამების შესაბამისად (3.4):
S1HF = 1/2πf2 Rn α1 = 1/(2∙3.14∙5000∙2.0∙16) = 1.00 μF,
L2BЧ = Rн/2πf2 α2 = 16/(2∙3.14∙5000∙2.0) = 0.25 mH.
ამ ფორმულების გამოყენებით გაკეთებული გამოთვლები სწორია მხოლოდ იმ შემთხვევაში, თუ ფილტრები დატვირთულია აქტიური (ომური) წინააღმდეგობით. ფილტრების პარამეტრების შესატყვისად დინამიკების რეალურ კომპლექსურ წინაღობასთან, საჭიროა დამატებით დააკავშიროთ შესატყვისი წრე თითოეული დინამიკის პარალელურად. ასეთი მიკროსქემის პარამეტრები იპოვება იმ პირობით, რომ ამ წრედის რთული წინააღმდეგობა Zag და დინამიკის Zgg რთული წინააღმდეგობა ანაზღაურებენ ერთმანეთს პარალელურად შეერთებისას და უზრუნველყოფენ მთლიან აქტიურ წინააღმდეგობას, ანუ 1/ Zag+1/. Zgg = 1/Re.
ასეთი მიკროსქემის ელემენტების გამოსათვლელად აგებულია დინამიკის ექვივალენტური ელექტრული წრე (იხ. წინა სტატია მოსკოვის რეგიონის 2008 წლის დეკემბრის ნომერში) და მასთან დაკავშირებით იქმნება ორმაგი კომპენსაციის წრე. დინამიკის ეკვივალენტური მიკროსქემის დიაგრამა და შესაბამისი კომპენსაციის წრე ნაჩვენებია ნახ. 13. დაბალი სიხშირის დინამიკის შეყვანის წინაღობის საკომპენსაციოდ შეგიძლიათ გამოიყენოთ გამარტივებული წრე (რადგან დინამიკის რეზონანსი მნიშვნელოვნად დაბალია ფილტრის გამორთვის სიხშირეზე და არ მოქმედებს მის პარამეტრებზე), რომელიც შედგება ორი ელემენტისგან Rk1= Re და Ck1=Lvc/Re2, სადაც Re და Lvc არის დინამიკის ხმის კოჭის წინააღმდეგობა და ინდუქციურობა.

საშუალო და მაღალი სიხშირის დინამიკისთვის, სრული კომპენსაციის წრე ჩართულია მხოლოდ იმ შემთხვევაში, თუ დინამიკების გამორთვის სიხშირე და რეზონანსები ახლოს არის - წინააღმდეგ შემთხვევაში, საკმარისია გამოიყენოთ გამარტივებული წრე (პარამეტრების გაანგარიშება). სრული წრე მოცემულია წიგნში Aldoshin I.A., Voishvillo A.G. "მაღალი ხარისხის აკუსტიკური სისტემები"). გარდა ამისა, სქემში ზოგჯერ შედის დამატებითი ფილტრები, რათა ამოიღონ ინდივიდუალური მწვერვალები ამპლიტუდა-სიხშირის პასუხში.
სამმხრივი აკუსტიკური სისტემის ფილტრის მიკროსქემის მაგალითი, საშუალო სიხშირის დინამიკისთვის და L- ფორმის დამატებითი დინამიკისთვის ჩასმული განყოფილების შესატყვისი სქემების გათვალისწინებით, რომელიც შედგება ორი რეზისტორისგან ხმის წნევის დონის გასათანაბრებლად. დაბალი სიხშირის, საშუალო სიხშირის და მაღალი სიხშირის დინამიკები, ნაჩვენებია ნახ. 14.

ამჟამად ხაზოვანი ელექტრონული სქემების ოპტიმალური სინთეზის კომპიუტერული მეთოდები გამოიყენება ფილტრაციისა და კორექტირების სქემების გამოსათვლელად. ამისათვის დაყენებულია ფილტრის სტრუქტურა და ელემენტების საწყისი მნიშვნელობები, შემდეგ გამოითვლება სიხშირის პასუხის, ფაზის პასუხის და ჯგუფის შეფერხების საერთო გამომავალი მნიშვნელობები, დინამიკების ფაქტობრივი გაზომილი პარამეტრების გათვალისწინებით, რომელიც მდებარეობს კორპუსი და მიკროსქემის ელემენტების მიზანმიმართული შეცვლით, განსხვავება რეალურ და მითითებულ პარამეტრებს შორის მინიმუმამდეა დაყვანილი. დიზაინის ოპტიმალური მეთოდების გამოყენება საშუალებას გვაძლევს უზრუნველვყოთ ფილტრისა და დინამიკის პარამეტრების საუკეთესო ფართოზოლოვანი შესაბამისობა და მივიღოთ აკუსტიკური სისტემის პარამეტრების ოპტიმალური მისაღწევი მნიშვნელობა.
ამჟამად მიმდინარეობს აქტიური კვლევები ციფრული ფილტრის პროცესორების გამოყენებაზე აკუსტიკურ სისტემებში, რაც შესაძლებელს ხდის სისტემის პარამეტრების რეალურ დროში გადაკეთებას ხმის სიგნალის ტიპზე დამოკიდებულებით, ასევე უზრუნველყოს მახასიათებლების ოპტიმალური შესაბამისობა. აკუსტიკური სისტემა ოთახის პარამეტრებით, მაგრამ ეს ტექნიკა ჯერ კიდევ განვითარების დასაწყისშია და ჯერ არ ჰპოვა ფართო გამოყენება ინდუსტრიულ განვითარებაში.
პრობლემის დეტალურ განხილვამდე ჩვენ გამოვყოფთ ამოცანების სპექტრს; საბოლოო მიზნის ცოდნით, უფრო ადვილი იქნება სწორი მიმართულების არჩევა. დინამიკის სისტემების საკუთარი ხელით დამზადება იშვიათი მოვლენაა. პრაქტიკაში გამოიყენება პროფესიონალები და დამწყები მუსიკოსები, როდესაც მაღაზიაში შეძენილი ვარიანტები არ არის დამაკმაყოფილებელი. პრობლემა ჩნდება ავეჯში ინტეგრაციის ან არსებული მედიის მაღალი ხარისხის მოსმენის დროს. ეს არის ტიპიური მაგალითები, რომელთა გადაჭრა შესაძლებელია ზოგადად მიღებული მეთოდების გამოყენებით. ჩვენ გადავხედავთ მას. ჩვენ არ გირჩევთ დინამიკის სისტემაში დიაგონალზე გადახვევას, ჩახედეთ მასში!
აკუსტიკური სისტემის დიზაინი
არ არსებობს შანსი, რომ თავად გააკეთოთ აკუსტიკური სისტემა თეორიის გაგების გარეშე. მუსიკის მოყვარულებმა უნდა იცოდნენ, რომ ბიოლოგიური სახეობა ჰომო საპიენსი შიდა ყურის მეშვეობით ესმის ბგერის ვიბრაციას 16-20000 ჰც სიხშირით. რაც შეეხება კლასიკურ შედევრებს, ვარიაცია მაღალია. ქვედა კიდე არის 40 ჰც, ზედა კიდე 20000 ჰც (20 კჰც). ამ ფაქტის ფიზიკური მნიშვნელობა ის არის, რომ ყველა სპიკერს არ შეუძლია ერთდროულად სრული სპექტრის რეპროდუცირება. შედარებით ნელ სიხშირეებს უკეთესად უმკლავდება მასიური საბვუფერები, ხოლო ქვედა კიდეზე ჩხვლეტა რეპროდუცირებულია პატარა დინამიკებით. ცხადია, ეს არაფერს ნიშნავს ადამიანების უმეტესობისთვის. და მაშინაც კი, თუ სიგნალის ნაწილი გაქრება ან არ არის რეპროდუცირებული, ამას ვერავინ შეამჩნევს.
ჩვენ გვჯერა, რომ მათ, ვინც მიზნად ისახავს საკუთარი აკუსტიკური სისტემის შექმნას, კრიტიკულად უნდა შეაფასოს ხმა. სასარგებლო იქნება იმის ცოდნა, რომ შესაფერის დინამიკს აქვს ორი ან მეტი დინამიკი, რათა შეძლოს ასახოს ხმოვანი სპექტრის ფართო ზოლის ხმა. მაგრამ რთულ სისტემებშიც კი არის მხოლოდ ერთი საბვუფერი. ეს გამოწვეულია იმით, რომ დაბალი სიხშირეები იწვევს გარემოს ვიბრაციას, თუნდაც კედლებში შეღწევას. გაურკვეველი ხდება ზუსტად საიდან მოდის ბასი. შესაბამისად, არსებობს მხოლოდ ერთი დაბალი სიხშირის დინამიკი - საბვუფერი. მაგრამ რაც შეეხება სხვა საკითხებს, ადამიანი თავდაჯერებულად იტყვის, თუ რომელი მიმართულებიდან მოვიდა ესა თუ ის სპეციალური ეფექტი (ულტრაბგერითი სხივი იკეტება ხელით).
ზემოაღნიშნულთან დაკავშირებით ჩვენ დავყოფთ აკუსტიკური სისტემებს:
- მონო ფორმატში ჟღერადობა არაპოპულარულია, ამიტომ თავს არიდებთ ისტორიულ ექსკურსიებზე შეხებას.
- სტერეო ხმა უზრუნველყოფილია ორი არხით. ორივე შეიცავს დაბალ და მაღალ სიხშირეებს. თანაბარი დინამიკები, რომლებიც აღჭურვილია წყვილი დინამიკით (ბასი და სკიკი) უკეთესად შეეფერება.
- Surround Sound გამოირჩევა არხების უფრო დიდი რაოდენობით არსებობით, რაც ქმნის გარს ხმის ეფექტს. ჩვენ თავს არიდებთ დახვეწილობებით გატაცებას; ტრადიციულად, 5 დინამიკი პლუს საბვუფერი აწვდის დიაპაზონს მუსიკის მოყვარულებს. დიზაინი მრავალფეროვანია. კვლევა ჯერ კიდევ მიმდინარეობს აკუსტიკური გადაცემის ხარისხის გასაუმჯობესებლად. ტრადიციული განლაგება ასეთია: ოთახის ოთხ კუთხეში (უხეშად რომ ვთქვათ) არის დინამიკი, საბვუფერი იატაკზე მარცხნივ ან ცენტრში, წინა დინამიკი მოთავსებულია ტელევიზორის ქვეშ. ეს უკანასკნელი ნებისმიერ შემთხვევაში აღჭურვილია ორი ან მეტი დინამიკით.
მნიშვნელოვანია თითოეული სპიკერისთვის სწორი დანართის შექმნა. დაბალ სიხშირეებს დასჭირდება ხის რეზონატორი, მაგრამ დიაპაზონის ზედა ბოლოსთვის ამას მნიშვნელობა არ აქვს. პირველ შემთხვევაში, ყუთის გვერდები ემსახურება დამატებით ემიტერებს. თქვენ იხილავთ ვიდეოს, რომელიც ასახავს მეცნიერების მიხედვით დაბალი სიხშირეების ტალღის სიგრძის შესაბამისი საერთო ზომების დემონსტრირებას, პრაქტიკულად რჩება მხოლოდ მზა დიზაინის კოპირება; თემა მოკლებულია შესაბამის ლიტერატურას.
ასახულია ამოცანების სპექტრი, მკითხველს ესმის, რომ ხელნაკეთი აკუსტიკური სისტემა აგებულია შემდეგი ელემენტებით:
- სიხშირის დინამიკების ნაკრები არხების რაოდენობის მიხედვით;
- პლაივუდი, ვინირი, კორპუსის დაფები;
- დეკორატიული ელემენტები, საღებავი, ლაქი, ლაქა.
აკუსტიკა დიზაინი
თავდაპირველად აირჩიეთ სვეტების რაოდენობა, ტიპი, მდებარეობა. ცხადია, იმაზე მეტი არხის წარმოება, ვიდრე სახლის კინოთეატრს აქვს, არაგონივრული ტაქტიკური ნაბიჯია. კასეტა ჩამწერს დასჭირდება მხოლოდ ორი დინამიკი. საშინაო კინოთეატრისთვის სულ მცირე ექვსი კორპუსი გამოვა (მეტი დინამიკები იქნება). საჭიროების მიხედვით ავეჯში ჩაშენებულია აქსესუარები, დაბალი სიხშირის გამრავლების ხარისხი დაბალია. ახლა სპიკერების არჩევის საკითხი: ნაიდენკოსა და კარპოვის პუბლიკაციაში მოცემულია ნომენკლატურა:

- დაბალი სიხშირეები - CA21RE (H397) თავი 8 დიუმიანი მორგებით.
- საშუალო დიაპაზონი - MP14RCY/P (H522) 5" თავი.
- მაღალი სიხშირეები - თავი 27TDC (H1149) 27 მმ-ით.
მათ წარმოადგინეს აკუსტიკური სისტემების დიზაინის ძირითადი პრინციპები, შემოგვთავაზეს ფილტრის ელექტრული წრე, რომელიც წყვეტს ნაკადს ორ ნაწილად (ზემოთ მოცემულია სამი ქვეჯგუფის სია) და დაასახელეს შეძენილი დინამიკები, რომლებიც წყვეტენ ორი სტერეოს შექმნის პრობლემას. დინამიკები. ჩვენ თავიდან ავიცილებთ გამეორებას; მკითხველს შეუძლია გაჭირვება გადახედოს განყოფილებას და მოძებნოს კონკრეტული სათაურები.
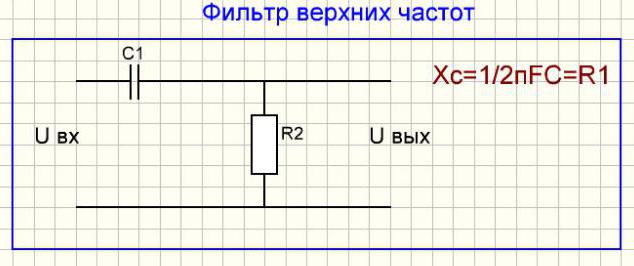
შემდეგი კითხვა იქნება ფილტრი. ჩვენ გვჯერა, რომ National Semiconductor არ იქნება განაწყენებული, თუ Ridico-ს მთარგმნელობითი გამაძლიერებლის ნახატის სკრინშოტზე გადავიღებთ. ნახატზე ნაჩვენებია აქტიური ფილტრი +15, -15 ვოლტი ელექტრომომარაგებით, 5 იდენტური მიკროსქემები (ოპერაციული გამაძლიერებლები), ქვეზოლების გათიშვის სიხშირე გამოითვლება სურათზე ნაჩვენები ფორმულით (ტექსტში დუბლირებული):
P – ნომერი Pi, ცნობილი სკოლის მოსწავლეებისთვის (3.14); R, C - რეზისტორებისა და ტევადობის მნიშვნელობები. ფიგურაში, R = 24 kOhm, C არის ჩუმად.

აქტიური ფილტრი იკვებება ელექტრო დენით
არჩეული დინამიკების შესაძლებლობების გათვალისწინებით, მკითხველი შეძლებს პარამეტრის არჩევას. აღებულია სპიკერის დაკვრის დიაპაზონის მახასიათებლები, ნაპოვნია მათ შორის გადახურვის კავშირი და მოთავსებულია ათვლის სიხშირე. ფორმულის წყალობით, ჩვენ ვიანგარიშებთ ტევადობის მნიშვნელობას. მოერიდეთ წინააღმდეგობის მნიშვნელობის, მიზეზის შეხებას: მას შეუძლია (სადავო ფაქტი) დაადგინოს გამაძლიერებლის მუშაობის წერტილი, გადაცემის კოეფიციენტი. თარგმანში მოცემულ სიხშირეზე, რომელსაც ჩვენ გამოვტოვებთ, ლიმიტი არის 1 kHz. გამოვთვალოთ მითითებული შემთხვევის სიმძლავრე:
C = 1/2P Rf = 1/2 x 3.14 x 24000 x 1000 = 6.6 pF.
ეს არ არის ისეთი დიდი ტევადობა; ის შერჩეულია მაქსიმალური დასაშვები ძაბვის საფუძველზე. წრეში +15 და -15 V წყაროებით, ნაკლებად სავარაუდოა, რომ ნომინალური მნიშვნელობა აღემატებოდეს მთლიან დონეს (30 ვოლტი), მიიღეთ ავარიის ძაბვა (საცნობარო წიგნი დაგეხმარებათ) მინიმუმ 50 ვოლტი. არ შეეცადოთ დააყენოთ DC ელექტროლიტური კონდენსატორები; წრეს აქვს აფეთქების შანსი. აზრი არ აქვს LM833 ჩიპის ორიგინალური მიკროსქემის ძიებას სიზიფური შრომის გამო. ზოგიერთი მკითხველი იპოვის შემცვლელ ჩიპს, რომელიც განსხვავდება... თქვენი გაგების იმედი გვაქვს.
კონდენსატორების შედარებით მცირე ტევადობასთან დაკავშირებით (საცალო და მთლიანი), ფილტრის აღწერაში ნათქვამია: აქტიური კომპონენტების გარეშე თავების დაბალი წინაღობის გამო, რეიტინგები უნდა გაიზარდოს. ბუნებრივად იწვევს დამახინჯების წარმოქმნას ელექტროლიტური კონდენსატორებისა და ხვეულების არსებობის გამო ფერომაგნიტური ბირთვით. თავისუფლად გადაიტანეთ დიაპაზონის გაყოფის საზღვრები, მთლიანი გამტარუნარიანობა იგივე რჩება.

პასიურ ფილტრებს საკუთარი ხელით ააწყობს ნებისმიერი, ვინც გაწვრთნილი იქნება ფიზიკის სასკოლო კურსზე შედუღებაზე. როგორც ბოლო საშუალება, მიმართეთ გონოროვსკის დახმარებას; არ არსებობს უკეთესი აღწერა სიგნალების გავლის სირთულეების შესახებ რადიო-ელექტრონული ხაზებით, რომლებსაც აქვთ არაწრფივი თვისებები. წარმოდგენილი მასალა ავტორებს დაბალი და მაღალი სიხშირის ფილტრებით აინტერესებდა. სიგნალის სამ ნაწილად დაყოფის მსურველებმა უნდა წაიკითხონ ნაწარმოებები, რომლებიც ავლენენ გამტარი ფილტრების საფუძველს. მაქსიმალური დასაშვები (ან ავარიის) ძაბვა იქნება მწირი, ნომინალური მნიშვნელობა გახდება მნიშვნელოვანი. აღნიშნული ელექტროლიტური კონდენსატორების შესატყვისი არის ტევადობები, რომელთა ნომინალური მნიშვნელობა ათობით მიკროფარადია (სიდიდის სამი რიგით მეტი, ვიდრე აქტიური ფილტრის მიერ გამოყენებული).
დამწყებთათვის შეშფოთებულია დინამიკის სისტემებზე +15, -15 ვ ძაბვის მიღების საკითხი. ჩააქარეთ ტრანსფორმატორი (მაგალითი იყო მოყვანილი, კომპიუტერის პროგრამა Trans50Hz), აღჭურვა სრულტალღოვანი რექტიფიკატორით (დიოდური ხიდი), გაფილტრეთ, ისიამოვნეთ. და ბოლოს, შეიძინეთ აქტიური ან პასიური ფილტრი. ამ ნივთს კროსოვერი ჰქვია, ფრთხილად შეარჩიეთ დინამიკები, უფრო ზუსტად დააკავშირეთ დიაპაზონები ფილტრის პარამეტრებთან.
პასიური დინამიკების კროსოვერებისთვის, თქვენ ნახავთ ბევრ კალკულატორს ინტერნეტში (http://ccs.exl.info/calc_cr.html). საანგარიშო პროგრამა იღებს დინამიკების შეყვანის წინაღობას და გაყოფის სიხშირეს საწყის რიცხვებად. შეიყვანეთ მონაცემები, რობოტის პროგრამა სწრაფად უზრუნველყოფს ტევადობისა და ინდუქციების მნიშვნელობებს. ქვემოთ მოცემულ გვერდზე მიუთითეთ ფილტრის ტიპი (Bessel, Butterworth, Linkwitz-Riley). ჩვენი აზრით, ეს პროფესიონალთა დავალებაა. ზემოაღნიშნული აქტიური ეტაპი ყალიბდება მე-2 რიგის ბატერვორტის ფილტრებით (სიხშირის პასუხის შემცირების სიჩქარე 12 დბ ოქტავაზე). ეს ეხება სისტემის სიხშირის პასუხს (სიხშირის პასუხს), რომელიც გასაგებია მხოლოდ პროფესიონალებისთვის. როდესაც ეჭვი გეპარებათ, აირჩიეთ შუა გზა. ფაქტიურად შეამოწმეთ მესამე წრე (ბესელი).
კომპიუტერის დინამიკების აკუსტიკა
მე შემთხვევით ვუყურე ვიდეოს YouTube-ზე: ახალგაზრდამ გამოაცხადა, რომ საკუთარი ხელით დაამზადებდა აკუსტიკური სისტემას. ბიჭი ნიჭიერია: მან ამოიღო პერსონალური კომპიუტერის დინამიკები - კარგი, არცერთი - გამოიტანა გამაძლიერებელი რეგულატორით, მოათავსა ასანთის კოლოფში (დინამიკის სისტემის კორპუსი). კომპიუტერის დინამიკები ცნობილია ცუდი ბას რეაქციით. თავად მოწყობილობები პატარაა, მსუბუქი და მეორეც, ბურჟუაზია ზოგავს მასალებს. საიდან მოდის ბასი დინამიკების სისტემაში? ახალგაზრდამ აიღო... წაიკითხეთ!
მუსიკალური ცენტრის ყველაზე ძვირადღირებული კომპონენტი. მაღალი დონის აკუსტიკა იაფი აპარტამენტზე ნაკლები ღირს. დინამიკების შეკეთება და აწყობა კარგი საქმეა.
დინამიკის სისტემის დაბალი სიხშირის გამაძლიერებელი აწყობს მოწინავე რადიომოყვარულს, არ არის საჭირო კულიბინები. ხმის კონტროლის ღილაკი გამოდის ასანთის კოლოფიდან, შეყვანა არის ერთ მხარეს, გამომავალი არის მეორეზე. ძველი ხმის სისტემის დინამიკები პატარაა. ახალგაზრდა კაცს ხელში ჩაუვარდა ძველი დინამიკი, არა ზღაპრული ზომის, არამედ მყარი. საბჭოთა პერიოდის დინამიკების სისტემიდან.

იმისთვის, რომ ხმამ ჰაერი არ შეაწუხოს ღრიალით, ჭკვიანმა ახალგაზრდებმა ერთი დიუმიანი დაფები ყუთში დაამაგრეს. ძველი აკუსტიკური სისტემის სპიკერი განთავსებული იყო საფოსტო ყუთის ზომით, გადაადგილებული, როგორც ამას აკეთებენ თანამედროვე სახლის კინოთეატრის საბვუფერების მწარმოებლები. ძალიან მეზარებოდა დინამიკის შიდა ნაწილის ხმის იზოლაციით გაფორმება. ნებისმიერ მსურველს შეუძლია აკუსტიკური სისტემისთვის ბატინგი ან სხვა მსგავსი მასალა გამოიყენოს. პატარა დინამიკები მოთავსებულია მოგრძო ყუთებში, რომლებიც მხოლოდ ბოლოში შეიცავს დინამიკს. ამაყმა ახალგაზრდობამ დინამიკის სისტემის ერთი არხი ორ პატარა დინამიკს დაუკავშირა, მეორე კი ერთ დიდს. სამუშაოები.
ახალგაზრდა კაცი ზღაპრული ბიჭია, ის არ სვამს კარიბჭეში, როგორც თანატოლები, თავისუფალ დროს არ აფუჭებს მომავალ პატარძლებს, დაკავებულია საქმით. როგორც ერთმა ნაცნობმა თქვა: „ახალ თაობას ეპატიება ცოდნისა და გამოცდილების ნაკლებობა და არა ქედმაღლობის სიჭარბე, რომელსაც გულგრილობა აძლიერებს“.
გაუმჯობესებები
ჩვენ გადავწყვიტეთ გაგვეუმჯობესებინა მეთოდი; ჩვენ გულწრფელად ვიმედოვნებთ, რომ დამატება ხელს შეუწყობს თავად აკუსტიკური სისტემის გაუმჯობესებას. პრობლემა? კონცეფცია გამოიგონეს რადიო ინჟინრებმა და აკუსტიკური სისტემების შემქმნელებმა - სიხშირე. სამყაროს ვიბრაციას აქვს სიხშირე. ისინი ამბობენ, რომ ეს თანდაყოლილიც კი არის ადამიანის აურაში. ტყუილად არ არის, რომ ყველა კარგ სპიკერს შეუძლია რამდენიმე სპიკერის განთავსება. მსხვილი განკუთვნილია დაბალი სიხშირეებისთვის, ბასისთვის; სხვები - საშუალო და მაღალი. განსხვავებულია არა მხოლოდ ზომა, არამედ მათი სტრუქტურაც. ჩვენ უკვე განვიხილეთ ეს საკითხი და დაინტერესებულ პირებს მივმართეთ წერილობით მიმოხილვებზე, სადაც მოცემულია აკუსტიკური სისტემების კლასიფიკაცია და ყველაზე პოპულარული მოქმედების პრინციპები.
კომპიუტერულმა მეცნიერებმა იციან სისტემის ზუმერი, რომელიც მოქმედებს BIOS-ის შეფერხების საშუალებით, რომელსაც, როგორც ჩანს, შეუძლია ერთი ხმის გამომუშავება, მაგრამ ნიჭიერი პროგრამისტები მასზე წერდნენ დახვეწილ მელოდიებს, თუნდაც ციფრული სინთეზისა და ხმის რეპროდუქციის მცდელობისას. თუმცა, ასეთი ტვიტერი, თუ სასურველია, ბასს არ შეუძლია.
რატომ ეს საუბარი... დიდი სპიკერი უბრალოდ არ უნდა იყოს ადაპტირებული ერთ-ერთ არხზე, არამედ უნდა მიენიჭოს ბასის სპეციალობა. მოგეხსენებათ, თანამედროვე კომპოზიციების უმეტესობა (ჩვენ არ ვიღებთ ხმას) გათვლილია ორ არხზე (სტერეო დაკვრა). გამოდის, რომ ორი იდენტური დინამიკი (პატარა) ერთსა და იმავე ნოტებს უკრავს, ამას ცოტა აზრი აქვს. ამავე დროს, იმავე არხიდან, ბასი იკარგება და მაღალი სიხშირეები კვდება დიდ დინამიკზე. Რა უნდა გავაკეთო? ჩვენ ვთავაზობთ წრეში პასიური გამტარი ფილტრების შეყვანას, რაც ხელს შეუწყობს ნაკადის ორ ნაწილად გაყოფას. დიაგრამას უცხოური პუბლიკაციიდან ვიღებთ იმ უბრალო მიზეზის გამო, რომ ეს იყო პირველი, რომელმაც თვალი მოგვახვედრა. აქ არის ბმული ორიგინალური საიტის chegdomyn.narod.ru. რადიომოყვარულმა გადაწერა წიგნიდან, ბოდიშს ვუხდით ავტორს ორიგინალური წყაროს არ მითითებისთვის. ეს ხდება იმ მარტივი მიზეზის გამო, რომ ის ჩვენთვის უცნობია.
მაშ ასე, აი სურათი. სიტყვები Woofer და Tweeter მაშინვე იპყრობს თქვენს თვალს. როგორც თქვენ ალბათ მიხვდებით, ეს არის, შესაბამისად, საბვუფერი დაბალი სიხშირეებისთვის და დინამიკი მაღალი სიხშირეებისთვის. მუსიკალური ნაწარმოებების დიაპაზონი დაფარულია 50-დან 20000 ჰც-მდე, საბვუფერი კი დაბალი სიხშირის დიაპაზონს ითვალისწინებს. თავად რადიომოყვარულებს შეუძლიათ გამოთვალონ ზოლები ცნობილი ფორმულების გამოყენებით; შედარებისთვის, პირველი ოქტავის A, როგორც ცნობილია, არის 440 ჰც. მიგვაჩნია, რომ ასეთი დაყოფა ჩვენს საქმეს შეეფერება. უბრალოდ მინდა ვიპოვო ორი დიდი დინამიკი, თითო თითოეული არხისთვის. მოდით შევხედოთ დიაგრამას ...

არ არის ზუსტად მუსიკალური სქემა. სისტემის მიერ დაკავებულ მდგომარეობაში, ხმა იფილტრება. დიაპაზონი 300-3000 ჰც. გადამრთველი ხელმოწერილია ვიწრო, ითარგმნება როგორც ზოლი. ფართო დაკვრის მისაღებად, ჩამოწიეთ ტერმინალები. მუსიკის თაყვანისმცემლებს შეიძლება სურდეთ გადააგდოთ ვიწრო გამშვები ფილტრი; მათ, ვისაც უყვარს სკაიპზე სერფინგი, უნდა მოერიდონ ნაჩქარევ გადაწყვეტილებას. წრე მთლიანად აღმოფხვრის მიკროფონის მარყუჟის ეფექტს, რომელიც ყველგან არის ცნობილი: მაღალი ხმაურის ხმა ზედმეტად გაძლიერების გამო (დადებითი გამოხმაურება). ღირებული ეფექტი, სამხედრო კაცმაც კი იცის სპიკერის გამოყენების სირთულეები. ლეპტოპის მფლობელმა იცის...
უკუკავშირის ეფექტის აღმოსაფხვრელად, შეისწავლეთ საკითხი, იპოვნეთ რა სიხშირით რეზონანსს სისტემა, ამოიღეთ ზედმეტი ფილტრით. ძალიან კომფორტულად. პოპულარულ მუსიკასთან დაკავშირებით მიკროფონს ვთიშავთ, დინამიკებს ვაშორებთ (კარაოკეს შემთხვევაში) და ვიწყებთ სიმღერას. მაღალ და დაბალგამშვებ ფილტრებს უცვლელად დავტოვებთ, პროდუქტები გამოთვალეს უცნობმა დასავლელმა მეგობრებმა. მათთვის, ვისაც უჭირს უცხოური ნახატების წაკითხვა, ჩვენ განვმარტავთ, რომ დიაგრამა გამოსახულია (ვიწრო გამტარი ფილტრი გაუქმებულია):
- ტევადობა 4 μF.
- არაინდუქციური წინააღმდეგობები R1, R2 ნომინალური მნიშვნელობით 2.4 Ohm, 20 Ohm.
- ინდუქციურობა (კოჭა) 0,27 mH.
- წინააღმდეგობა R3 8 Ohms.
- კონდენსატორი C4 17 uF.

დინამიკები უნდა ემთხვეოდეს. რჩევა ამ საიტიდან. საბვუფერი იქნება MSM 1853, ტვიტერი (სიტყვა არ არის ჩამოწერილი) იქნება PE 270-175. თქვენ თავად შეგიძლიათ გამოთვალოთ გამტარობა. დიდი ასო Ω ნიშნავს kOhm - დიდი საქმე არ არის, შეცვალეთ მნიშვნელობა. შეგახსენებთ, რომ პარალელურად დაკავშირებული კონდენსატორების ტევადობა ემატება, ისევე როგორც სერიასთან დაკავშირებული რეზისტორები. იმ შემთხვევაში, თუ ძნელია შესაბამისი დასახელების მიღება. ნაკლებად სავარაუდოა, რომ თქვენ შეძლებთ საკუთარი ხელით დინამიკების დამზადებას; რეალისტურია მცირე წინააღმდეგობის მნიშვნელობების მიღება. არ გამოიყენოთ ხვეულები, ჩვენ ვჭრით ნიქრომის ან მსგავსი შენადნობების ფირფიტებს. წარმოების შემდეგ რეზისტორი ლაქირებულია; მაღალი დენი არ არის დაგეგმილი; ელემენტი არ უნდა იყოს დაცული.
ინდუქტორების დაყენება უფრო ადვილია. ლოგიკურია ონლაინ კალკულატორის გამოყენება, ტევადობის დაყენებით მივიღებთ პარამეტრებს: ბრუნთა რაოდენობა, დიამეტრი, ბირთვის მასალა, ბირთვის სისქე. მაგალითი მოვიყვანოთ, უსაფუძვლობის თავიდან აცილების მიზნით. ჩვენ ვსტუმრობთ Yandex-ს, აკრიფეთ რაღაც "ონლაინ ინდუქციური კალკულატორი". ჩვენ ვიღებთ უამრავ გამომავალ პასუხს. ჩვენ ვირჩევთ საიტს, რომელიც მოგვწონს და ვიწყებთ ფიქრს იმაზე, თუ როგორ გავაფუჭოთ აკუსტიკური სისტემის ინდუქციურობა ნომინალური მნიშვნელობით 0,27 mH. ჩვენ მომეწონა საიტი coil32.narod.ru, დავიწყოთ.
საწყისი ინფორმაცია: ინდუქციურობა 0,27 mH, ჩარჩოს დიამეტრი 15 მმ, PEL მავთული 0,2, გრაგნილის სიგრძე 40 მილიმეტრი.

მაშინვე ჩნდება კითხვა, კალკულატორის დანახვისას, სად მივიღოთ იზოლირებული მავთულის ნომინალური დიამეტრი... ჩვენ ბევრი ვიმუშავეთ, ვიპოვეთ ცხრილი ვებგვერდზე servomotors.ru, აღებული საცნობარო წიგნიდან, რომელსაც წარმოგიდგენთ მიმოხილვაში, განიხილეთ. ეს თქვენი ჯანმრთელობისთვის. სპილენძის დიამეტრი 0,2 მმ, იზოლირებული ბირთვი 0,225 მმ. თავისუფლად მიაწოდეთ მნიშვნელობები კალკულატორს, გამოთვალეთ საჭირო მნიშვნელობები.
შედეგი იყო ორფენიანი ხვეული 226 მობრუნებით.მავთულის სიგრძე იყო 10,88 მეტრი, წინააღმდეგობა დაახლოებით 6 ohms. ნაპოვნია ძირითადი პარამეტრები, ვიწყებთ ქარს. ხელნაკეთი დინამიკის სისტემა დამზადებულია ხელნაკეთ კორპუსში, არის ადგილი ფილტრის დასამაგრებლად. ჩვენ ვაკავშირებთ ტვიტერს ერთ გამოსავალზე, ხოლო საბვუფერს მეორეზე. რამდენიმე სიტყვა გაძლიერების შესახებ. შეიძლება მოხდეს, რომ გამაძლიერებლის საფეხურს არ ჰქონდეს ოთხი დინამიკის მხარდაჭერა. თითოეული წრე ხასიათდება გარკვეული დატვირთვის სიმძლავრით; თქვენ არ შეგიძლიათ მაღლა ხტომა. დინამიკის სისტემა შექმნილია ფიქსირებული სათავე ოთახის გათვალისწინებით; დატვირთვის შესატყვისად, ხშირად გამოიყენება ემიტერი მიმდევარი. კასკადი, რომელიც ამუშავებს წრედს, სრულ გავლენას ახდენს ნებისმიერ დინამიკზე.
გამყოფი სიტყვები დამწყები დიზაინერებისთვის
ჩვენ გვჯერა, რომ ჩვენ დავეხმარეთ მკითხველს იმის გაგებაში, თუ როგორ სწორად შეიმუშავონ აკუსტიკური სისტემა. პასიური ელემენტების (კონდენსატორები, რეზისტორები, ინდუქტორები) მიღება და დამზადება ნებისმიერს შეუძლია. რჩება მხოლოდ დინამიკის სისტემის კორპუსის აწყობა საკუთარი ხელით. და ჩვენ გვჯერა, რომ ეს ასე არ იქნება. მნიშვნელოვანია გვესმოდეს, რომ მუსიკა იქმნება სიხშირეების დიაპაზონით, რომლებიც წყდება მოწყობილობის არასწორი წარმოებით. როდესაც გეგმავთ დინამიკის სისტემის შექმნას, დაფიქრდით და მოძებნეთ კომპონენტები. მნიშვნელოვანია მელოდიის ბრწყინვალების გადმოცემა, იქნება ძლიერი ნდობა: ნამუშევარი არ იყო უშედეგო. დინამიკის სისტემა დიდხანს გაძლებს და სიხარულს მოგანიჭებთ.
ჩვენ გვჯერა, რომ მკითხველი სიამოვნებით ამზადებს დინამიკების სისტემას საკუთარი ხელით. მომავალი დრო უნიკალურია. მერწმუნეთ, მე-20 საუკუნის დასაწყისში შეუძლებელი იყო ყოველდღიურად ტონობით ინფორმაციის მოპოვება. ტრენინგის შედეგი იყო მძიმე, შრომატევადი სამუშაო. ბიბლიოთეკების მტვრიანი თაროები მომიწია. ისიამოვნეთ ინტერნეტით. სტრადივარიუსმა თავისი ვიოლინოების ხე უნიკალური კომპოზიციით გააჟღერა. თანამედროვე მევიოლინეები აგრძელებენ იტალიური ნიმუშების არჩევას. დაფიქრდი, 30 წელი გავიდა, ეტლი შემორჩა.
დღევანდელმა თაობამ იცის ადჰეზივების ბრენდები და მასალების სახელები. მაღაზიებში იყიდება საჭირო ნივთები. სსრკ-მ წაართვა ხალხის სიმრავლე, უზრუნველყო მათთვის შედარებითი სტაბილურობა. დღეს უპირატესობა აღწერილია ფულის გამომუშავების უნიკალური გზების გამოგონების შესაძლებლობით. თვითნასწავლი პროფესიონალი ყველგან კომბოსტოს დაჭრის.
ეს სტატია გეტყვით, თუ როგორ უნდა გააკეთოთ მაღალი გამტარი ფილტრი საკუთარი ხელით. მაგრამ სანამ მე და შენ დავიწყებთ ამის გაგებას, ჩვენ უნდა გავიგოთ რაღაც. რა არის თავად მაღალი და დაბალი გამტარი ფილტრები?
განმარტება
ფილტრები შეიძლება დაიყოს ზედა (მაღალი) და ქვედა (დაბალი) სიხშირეებად. რატომ ამბობენ ადამიანები ხშირად „ტრიპლს“ და არა „ტრიპს“? ეს ხდება იმის გამო, რომ მაღალი სიხშირეები აუდიო ინჟინერიაში იწყება ორი კილოჰერცით. მაგრამ რადიო ინჟინერიაში ორი კილოჰერცი არის ხმის სიხშირე და ამიტომ მას "დაბალს" უწოდებენ.
ასევე არსებობს ისეთი რამ, როგორიცაა საშუალო სიხშირე. ეს ეხება ხმის ინჟინერიას. მაშ რა არის შუა უღელტეხილის ფილტრი? ეს არის რამდენიმე ზემოაღნიშნული მოწყობილობის კომბინაცია. ის ასევე შეიძლება იყოს გამტარი ფილტრი.
მაღალგამტარი ფილტრი არის ელექტრონული ან სხვა მოწყობილობა, რომელიც გადის სიგნალის მაღალ სიხშირეებს და რომელიც, შეყვანისას, თრგუნავს სიგნალის სიხშირეს ადრე მითითებული წყვეტის შესაბამისად. ჩახშობის ხარისხი ასევე დამოკიდებული იქნება ფილტრის სპეციფიკურ ტიპზე.
დაბალი სიხშირე განსხვავდება იმით, რომ მას შეუძლია გადასცეს შემომავალი სიგნალი, რომელიც იქნება მოცემული წყვეტის ქვემოთ, ხოლო მაღალი სიხშირეების ჩახშობა.
განაცხადის არეალი
მაღალი გამტარი ფილტრი შეიძლება გამოყენებულ იქნას მაღალი სიხშირის სიგნალების ხაზგასასმელად. ის ასევე ხშირად გამოიყენება აუდიო სიგნალების დამუშავებისას, მაგალითად, ცალკეულ ფილტრებში, რომლებსაც ასევე უწოდებენ გადაკვეთის ფილტრებს. ისინი ასევე გამოიყენება გამოსახულების დამუშავებისთვის, რათა ტრანსფორმაცია განხორციელდეს სიხშირის დომენში.
ეს არის ის, რისგან შედგება მარტივი მაღალი გამტარი ფილტრი:
- რეზისტორი.
- კონდენსატორი.
წინააღმდეგობის მუშაობა ტევადობაზე (R x C) არის დროის მუდმივი (პროცესის ხანგრძლივობა) მოცემული ფილტრისთვის, რომელიც უკუპროპორციული იქნება ათვლის სიხშირის ჰერცში (რხევის პროცესების საზომი ერთეული).
მაღალი გამშვები ფილტრის გაანგარიშება
მაშ როგორ გავაკეთოთ გაანგარიშება? სახლში ყველა ნაბიჯის შესასრულებლად, თქვენ უნდა შეადგინოთ ერთ-ერთი უმარტივესი ავტომატური გამოთვლის ცხრილი Microsoft Excel-ში, მაგრამ ამისათვის თქვენ უნდა შეძლოთ ამ პროგრამის ფორმულების გამოყენება.
შეგიძლიათ გამოიყენოთ ეს ფორმულა:
სადაც f არის ათვლის სიხშირე; R არის Om; C არის კონდენსატორის ტევადობა, F (ფარადები).
ტიპები
წარმოდგენილი მოწყობილობები ხუთი ტიპისაა და ახლა ჩვენ სათითაოდ გადავხედავთ მათ.
- U- ფორმის - გარეგნულად წააგავს ასო P-ს;
- T- ფორმის - წააგავს ასო T-ს;
- L- ფორმის - ჰგავს ასო G;
- ერთელემენტიანი (კონდენსატორი ემსახურება როგორც მაღალგამტარი ფილტრი);
- მრავალკავშირიანი ფილტრები იგივეა, რაც L- ფორმის ფილტრები, მხოლოდ ამ შემთხვევაში ისინი დაკავშირებულია სერიაში.
U- ფორმის
შეიძლება ითქვას, რომ ეს ფილტრები იგივეა, რაც L-ის ფორმის ფილტრები, მაგრამ გარდა ამისა, დასაწყისში მათზე კიდევ ერთი ნაწილია მიმაგრებული. ყველაფერი, რაც დაიწერება T-ის ფორმისთვის, იგივე იქნება U- ფორმისთვისაც. ერთადერთი განსხვავება ისაა, რომ ისინი გაზრდის შუნტირების ეფექტს წინა რადიოს წრეზე.
აქ მოცემულია L- ფორმის RC ფილტრის U- ფორმის RC ფილტრზე გადასვლის მაგალითები ასევე მაღალი სიხშირეებისთვის:

სურათზე ხედავთ, რომ თავდაპირველ წრეს ემატება კიდევ ერთი 2R რეზისტორი, რომელიც მდებარეობს პირველის პარალელურად.
აქ არის RL-ში კონვერტაციის მაგალითი:

აქ, რეზისტორის ნაცვლად, ჩნდება ინდუქტორი. ემატება მეორეც (2ლ), რომელიც მდებარეობს პირველის პარალელურად.
და მესამე მაგალითი არის კონვერტაცია LC-ზე:

T- ფორმის
T- ფორმის ფილტრი იგივეა, რაც L- ფორმის, მხოლოდ ერთი ელემენტის დამატებით.
ისინი გამოითვლება ისევე, როგორც ძაბვის გამყოფი, რომელიც შედგება ორი ნაწილისაგან არაწრფივი სიხშირის პასუხით. შემდეგი, მიღებულ მნიშვნელობას უნდა დაემატოს მესამე ელემენტის რეაქციის ნომერი.
ასევე შეიძლება გამოყენებულ იქნას გაანგარიშების სხვა მეთოდი, მაგრამ პრაქტიკაში ის ნაკლებად ზუსტია. მისი არსი მდგომარეობს იმაში, რომ L- ფორმის ფილტრის პირველი გამოთვლილი ნაწილის მიღებული მნიშვნელობის შემდეგ, ცვლადი იზრდება ან მცირდება ორჯერ და ნაწილდება ორ ელემენტად.
თუ ეს არის კონდენსატორი, მაშინ ხვეულების ტევადობის მნიშვნელობა გაორმაგდება, მაგრამ თუ ეს არის რეზისტორი ან ინდუქტორი, მაშინ ხვეულების წინააღმდეგობის მნიშვნელობა, პირიქით, ორმაგდება.
კონვერტაციის მაგალითები მოცემულია ქვემოთ.
გადასვლა L- ფორმის RC ფილტრიდან T- ფორმის ფილტრზე:

სურათი გვიჩვენებს, რომ გადასვლისთვის საჭიროა მეორე კონდენსატორის დამატება (2C).
გარდამავალი RL:

ამ შემთხვევაში ყველაფერი ანალოგიურია. იმისათვის, რომ გადასვლა წარმატებული იყოს, თქვენ უნდა დაამატოთ მეორე რეზისტორი სერიაში.
LC გადასვლა:

L- ფორმის
L- ფორმის ფილტრი არის ძაბვის გამყოფი, რომელიც შედგება ორი კომპონენტისგან არაწრფივი სიხშირის პასუხით (ამპლიტუდა-სიხშირის პასუხი). ამ ფილტრისთვის ნებადართულია მიკროსქემისა და ძაბვის გამყოფის ყველა ფორმულის გამოყენება.
ის შეიძლება წარმოდგენილი იყოს ასე:

თუ R1 წინააღმდეგობას შევცვლით კონდენსატორით, მივიღებთ მაღალგამტარ ფილტრს. შეცვლილი სქემის ფოტო შეგიძლიათ იხილოთ ქვემოთ:
გაანგარიშების ფორმულები:
U in=U out*(R1+R2)/R2; U out=U in*R2/(R1+R2); R სულ=R1+R2 R1=U in*R2/U out - R2; R2=U out*R სულ/U in |
ახლა მოდით შევხედოთ როგორ გავაკეთოთ გაანგარიშება.

მაღალი გამტარი ფილტრი ტვიტერებისთვის
ასეთი ფილტრის სტრუქტურა საკმაოდ მარტივია. იგი შედგება მხოლოდ ორი ნაწილისგან - კონდენსატორისა და რეზისტორისგან.
ფილტრის როლი, რომელიც გაფილტრავს შუა სიხშირის და დაბალი სიხშირის კომპონენტებს აუდიო სიგნალში, პირდაპირ შეასრულებს თავად კონდენსატორის როლს. და აპატიეთ ტავტოლოგიას, წინააღმდეგობა იმოქმედებს როგორც წინააღმდეგობა, ანუ შეამცირებს მოცულობის დონეს.
მნიშვნელოვანია: მაღალი სიხშირეები არ წყდება ექვალაიზერის მიერ მთავარი მოწყობილობიდან - ეს გამოიწვევს ცუდ ხმას. უმჯობესია მათი რიცხვის შემცირება წინააღმდეგობის გამოყენებით.
შესაქმნელად საჭირო მასალები
ტვიტერისთვის მაღალგამტარი ფილტრის შესაქმნელად დაგჭირდებათ შემდეგი მასალები:
- ერთი წინააღმდეგობა 5.5 Ohm;
- ერთი წინააღმდეგობა 4.0 Ohm;
- ორი MBM კონდენსატორი 1.0 μF;
- ელექტრო ლენტი ან სითბოს შესამცირებელი მილები.
აქტიური High Pass ფილტრი
აქტიურ ფილტრებს დიდი უპირატესობა აქვთ მათ პასიურ „ნათესავებთან“ შედარებით, განსაკუთრებით 10 kHz-ზე დაბალ სიხშირეებზე. ფაქტია, რომ პასიურები შეიცავს მაღალი ინდუქციურ კოჭებს და კონდენსატორებს, რომლებსაც აქვთ დიდი სიმძლავრე. ამის გამო, ისინი აღმოჩნდებიან ნაყარი და ძვირი და, შესაბამისად, მათი საერთო შესრულება შორს არის იდეალურისგან.
მაღალი ინდუქციურობა მიიღწევა ხვეული მობრუნების გაზრდილი რაოდენობის და ფერომაგნიტური ბირთვის გამოყენების გამო. ეს ათავისუფლებს თავის თვისებებს, როგორც სუფთა ინდუქციურობას, რადგან ხვეულის გრძელ მავთულს დიდი რაოდენობით მობრუნებით აქვს მნიშვნელოვანი წინააღმდეგობა, ხოლო ფერომაგნიტური ბირთვი გავლენას ახდენს ტემპერატურაზე, რაც მნიშვნელოვნად მოქმედებს მის მაგნიტურ თვისებებზე. დიდი ტევადობის გამოყენების აუცილებლობის გამო აუცილებელია კონდენსატორების გამოყენება, რომლებსაც არ აქვთ საუკეთესო სტაბილურობა. მათ შორისაა ელექტროლიტური კონდენსატორები. ფილტრებს, რომლებსაც აქტიურს უწოდებენ, დიდწილად არ გააჩნიათ ზემოაღნიშნული უარყოფითი მხარეები.
დიფერენციალური და ინტეგრატორის სქემები აგებულია ოპერაციული გამაძლიერებლების გამოყენებით; ისინი უმარტივესი აქტიური ფილტრებია. როდესაც მიკროსქემის ელემენტები შეირჩევა მკაფიო ინსტრუქციების მიხედვით, დიფერენცირების სიხშირეზე დამოკიდებულების დაცვით, ისინი გახდებიან მაღალი სიხშირის ფილტრები და, პირიქით, ინტეგრატორის სიხშირედან გამომდინარე, ისინი ხდებიან დაბალი სიხშირის ფილტრები. ფოტოები, რომლებიც ხსნის ყველაფერს, რაც ითქვა, მოცემულია ქვემოთ:

მაღალი გამტარი ფილტრი გამაძლიერებელზე
განვიხილოთ გამაძლიერებლის დაყენება მანქანაში.
მანქანაში ჩასვლამდე საჭიროა ძირითადი მოწყობილობის ყველა პარამეტრის ნულზე გადატვირთვა. კროსვორდის გამორთვის სიხშირე უნდა იყოს დაყენებული 50-70 ჰც-ის დიაპაზონში. წინა არხის ფილტრი გამაძლიერებელზე მანქანაში დაყენებულია მაღალი სიხშირის პოზიციაზე. წყვეტის სიხშირე ამ შემთხვევაში დაყენებულია 70-90 ჰც-ის დიაპაზონში.
თუ დიზაინი ითვალისწინებს წინა დინამიკების არხებით გაძლიერებას, მაშინ აუცილებელია მაღალი სიხშირის დინამიკების ცალკე დაყენება. ამისათვის ფილტრი უნდა დამონტაჟდეს შესაბამის პოზიციაზე და ათვლის სიხშირე უნდა შეირჩეს დაახლოებით 2500 ჰც.
სხვა საკითხებთან ერთად, თქვენ უნდა დაარეგულიროთ გამაძლიერებლის მგრძნობელობა. ამისათვის თქვენ თავდაპირველად უნდა გადააყენოთ იგი ნულამდე, მთავარია გადართოთ მოწყობილობა მაქსიმალური მოცულობის რეჟიმში და შემდეგ დაიწყოთ მგრძნობელობის გაზრდა. იმ მომენტში, როდესაც ხმის დამახინჯება გამოჩნდება, თქვენ უნდა შეწყვიტოთ რეგულატორის ბრუნვა, ასევე ოდნავ უნდა შეამციროთ მგრძნობელობა.
ასევე არსებობს ხმის ხარისხის შესამოწმებლად მარტივი გზა: თუ ჩართვის შემდეგ გესმით დაწკაპუნებები საბვუფერში და ხრაშუნის ხმა დინამიკში, ეს ნიშნავს, რომ არის სიგნალის ჩარევა.
ბასი არ უნდა იყოს მიბმული საბვუფერზე. ამისათვის თქვენ უნდა დაატრიალოთ ფაზის კონტროლი საბვუფერზე 180 გრადუსით. თუ ეს რეგულატორი არ არის, მაშინ თქვენ უნდა შეცვალოთ დადებითი და უარყოფითი კავშირის მავთული.
დააყენეთ თქვენი ხმის პროცესორი. ამისათვის აუცილებელია თითოეული არხისთვის დროის შეფერხებების რეგულირება. საჭიროა მარცხენა არხზე დროის დაყოვნების დაყენება, რათა მარცხენა დინამიკებიდან გამოსული ხმა დრაივერს მარჯვენასთან ერთდროულად მივიდეს. უნდა იგრძნოს, რომ ხმა სალონის ცენტრალური ნაწილიდან მოდის.
ყოველივე ზემოაღნიშნულის გარდა, ხმის პროცესორს შეუძლია გააუქმოს ბასის შეკვრა სალონის უკანა მხარეს. ამისათვის თქვენ უნდა დააყენოთ იგივე შეფერხებები წინა დინამიკების მარჯვენა და მარცხენა არხებში. შედეგად, ბასის ლოკალიზაცია საბვუფერის არეში აღმოიფხვრება.
ბრტყელი სიხშირის პასუხის მქონე კროსვორდის ფილტრებს აქვთ მრავალი უპირატესობა სხვა ტიპის ფილტრებთან შედარებით და ამჟამად ყველაზე მეტად გამოიყენება HI-FI კლასის დინამიკებში. აქედან გამომდინარე, მხოლოდ ამ ტიპის ფილტრი იქნება გათვალისწინებული გაანგარიშების მეთოდოლოგიაში. გაანგარიშების არსი იმაში მდგომარეობს, რომ საიზოლაციო ფილტრები პირველად გამოითვლება აქტიური დატვირთვისა და ძაბვის წყაროს უსასრულო გამომავალი წინააღმდეგობის მდგომარეობიდან (რაც მართალია თანამედროვე აუდიო გამაძლიერებლებისთვის). შემდეგ მიიღება ზომები დინამიკების ამპლიტუდა-სიხშირის და ფაზა-სიხშირის დამახინჯების გავლენის შესამცირებლად და მათი შეყვანის წინაღობის რთული ბუნების ფილტრების მახასიათებლებზე.
კროსვორდის ფილტრების გაანგარიშება იწყება მათი რიგის დადგენით და პროტოტიპის დაბალი გამტარი კიბეების ფილტრის ელემენტების პარამეტრების მოძიებით.
პროტოტიპის ფილტრი არის დაბალი გამტარი კიბეების ფილტრი, რომლის ელემენტების მნიშვნელობები ნორმალიზდება ერთეულის გათიშვის სიხშირეზე და ერთეული აქტიური დატვირთვის მიმართ. გარკვეული რიგის დაბალი გამტარი ფილტრის ელემენტების გაანგარიშებით რეალურ სიხშირეზე და დატვირთვის წინააღმდეგობის რეალური მნიშვნელობით, შესაძლებელია, სიხშირის კონვერტაციის გამოყენებით, განვსაზღვროთ წრე და გამოვთვალოთ ელემენტების მნიშვნელობები. მაღალი გამტარი ფილტრი და შესაბამისი რიგის ზოლიანი ფილტრი. პროტოტიპის ფილტრის ელემენტების ნორმალიზებული მნიშვნელობები, რომლებიც მუშაობს ძაბვის წყაროდან, განისაზღვრება მისი გამომავალი გამტარობის გაფართოებით მუდმივ ფრაქციაში. პროტოტიპის ფილტრის ელემენტების ნორმალიზებული მნიშვნელობები 1-ლი... მე-6 რიგის განცალკევების ფილტრების "ყველა უღელტეხილის ტიპის ბრტყელი სიხშირის პასუხის მქონე" გამოსათვლელად შეჯამებულია ცხრილში:
| ფილტრის შეკვეთა | ნორმალიზებული z მნიშვნელობის პარამეტრების მნიშვნელობა | |||||
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 1 | 1,0 | – | – | – | – | – |
| 2 | 2,0 | 0,5 | – | – | – | – |
| 3 | 1,5 | 1,33 | 0,5 | – | – | – |
| 4 | 1,88 | 1,59 | 0,94 | 0,35 | – | – |
| 5 | 1,54 | 1,69 | 1,38 | 0,89 | 0,31 | – |
| 6 | 1,8 | 1,85 | 1,47 | 1,12 | 0,73 | 0,5 |
სურათი 1 გვიჩვენებს მეექვსე რიგის პროტოტიპის ფილტრის დიაგრამას. ქვედა რიგის პროტოტიპის ფილტრის სქემები იქმნება შესაბამისი ელემენტების გაუქმებით α (დაწყებული დიდით) - მაგალითად, პირველი რიგის პროტოტიპის ფილტრი შედგება ერთი ინდუქციისგან α 1 და იტვირთება რ ნ.
ბრინჯი. 1.მე-6 რიგის ცალმხრივი დატვირთული პროტოტიპის დაბალი გამტარი ფილტრის მიკროსქემის სქემა
საიზოლაციო ფილტრების შერჩეული რიგის შესაბამისი ელემენტების რეალური პარამეტრების მნიშვნელობა, დატვირთვის წინააღმდეგობა რ ნ(Ohm) და ათვლის სიხშირე ვ დ(Hz) გამოითვლება შემდეგნაირად:
ა) დაბალი გამტარი ფილტრისთვის:
ყოველი ელემენტი α - ინდუქციურობაპროტოტიპის ფილტრი გარდაიქმნება რეალურ ინდუქციად (H), გამოითვლება ფორმულით:
L=αR ნ/ 2πf დ
ყოველი ელემენტი α - ტევადობაპროტოტიპის ფილტრი გარდაიქმნება რეალურ სიმძლავრედ (F), გამოითვლება ფორმულით:
C=α/ 2πf დრ ნ
ბ) მაღალი გამტარი ფილტრისთვის:
ყოველი ელემენტი α - ინდუქციურობაპროტოტიპის ფილტრი იცვლება ფორმულით გამოთვლილი რეალური სიმძლავრით:
C= 1/ 2πf დαR ნ
ყოველი ელემენტი α - ტევადობაპროტოტიპის ფილტრი შეიცვალა რეალური ინდუქციით, გამოითვლება ფორმულით:
L=R ნ/ 2πf დα
გ) გამტარი ფილტრისთვის:
ყოველი ელემენტი α - ინდუქციურობაჩანაცვლებულია თანმიმდევრული სქემით, რომელიც შედგება რეალურისაგან ლ და C - ელემენტები გამოითვლება ფორმულების გამოყენებით
L=αR ნ/ 2π (ვ დ 2 -ვ დ 1 )
სად ვ დ 2 და ვ დ 1 - გამტარი ფილტრის ქვედა და ზედა ათვლის სიხშირეები, შესაბამისად,
C= 1/ 4π 2 ვ 0 2 ლ
სად ვ 0 =√ვ დ 1 ვ დ 2 - გამტარი ფილტრის საშუალო სიხშირე.
თითოეული ელემენტი α - ტევადობა იცვლება პარალელური წრედით, რომელიც შედგება რეალურისაგან ლდა C- ელემენტები გამოითვლება ფორმულების გამოყენებით:
С=α/ 2π(ფ დ 2 -ვ დ 1 ) რ ნ,
L= 1/ 4π 2 ვ 0 2 C
მაგალითი.საჭიროა გამოვთვალოთ ცალკეული ფილტრების ელემენტების მნიშვნელობები სამმხრივი დინამიკის სისტემისთვის.
ჩვენ ვირჩევთ მეორე რიგის გამყოფ ფილტრებს. შერჩეული გადაკვეთის სიხშირეები იყოს: დაბალი სიხშირის და საშუალო სიხშირის არხებს შორის ვ დ 1 =500 ჰც, საშუალო სიხშირესა და მაღალ სიხშირეს შორის ვ დ 2 =5000 ჰც. DC დინამიკის წინაღობა: დაბალი სიხშირე და საშუალო სიხშირე - 8 Ohms, მაღალი სიხშირე - 16 Ohms.
ბრინჯი. 2.სამმხრივი დინამიკისთვის კროსვორდის ფილტრების გაანგარიშების მაგალითი ა)დინამიკების სიხშირის პასუხი ფილტრების გარეშე; ბ)დინამიკების სიხშირის პასუხი ფილტრებით, შესატყვისი და კორექტირების სქემებით; V)დინამიკების საერთო სიხშირის პასუხი სამუშაო ღერძზე და როდესაც მიკროფონი გადაადგილებულია ვერტიკალურ სიბრტყეში ±10° კუთხით
დინამიკების ამპლიტუდა-სიხშირის მახასიათებლები, გაზომილი დინამიკის სამუშაო ღერძზე ანექოურ კამერაში 1 მ მანძილზე, ნაჩვენებია ნახ. 2, ა) (დაბალი სიხშირის დინამიკი 100 GD-1, საშუალო სიხშირით 30 GD-8, მაღალი სიხშირე 10GD-43).
მოდით გამოვთვალოთ დაბალი გამტარი ფილტრი:
ელემენტების ნორმალიზებული პარამეტრების მნიშვნელობა განისაზღვრება ცხრილიდან: α 1 =2,0, α 2 =0,5.
ნახ. 1-დან ჩვენ განვსაზღვრავთ პროტოტიპის დაბალი გამტარი ფილტრის წრედს: ფილტრი შედგება ინდუქციისგან. α 1 , კონტეინერები α 2 და იტვირთება რნ.
დაბალი გამტარი ფილტრების რეალური ელემენტების მნიშვნელობები გვხვდება გამონათქვამების გამოყენებით და:
ლ 1 LF=αR ნ/ 2πf დ 1 =2.0 8.0/(2 3.14 500) = 5.1 mH,
C 1 LF=α/ 2πf დ 1 რ ნ=0,5/(2·3,14·500·8,0)=20 μF.
გამტარი ფილტრის ელემენტების მნიშვნელობები (საშუალო სიხშირის დინამიკისთვის) განისაზღვრება გამონათქვამების შესაბამისად ...:
ლ 1 საშუალო დონის=α 1 R n / 2π (ვ დ 2 -ვ დ 1 )=2.0 8.0/2 3.14(5000-500)=0.566 mH(HF მხარე)
თან 1 საშუალო დონის= 1/ 4π 2 ვ 0 2 ლ 1 MF =1/4 3.14 2 5000 500 5.66 10 -4 =18 μF(ბასის მხარე)
თან 2 საშუალო დონის=α 2 / 2π(ფ დ 2 -ვ დ 1 ) რ ნ=0.5/2·3.14(5000-500)·8.0=2.2 μF(HF მხარე)
ლ 2 საშუალო დონის= 1/ 4π 2 ვ 0 2 C 2 SF =1/4 3.14 2 5000 500 2.2 10 -6 =4.6 mH(ბასის მხარე)
მაღალი გამტარი ფილტრის ელემენტების მნიშვნელობები განისაზღვრება გამონათქვამების შესაბამისად და:
C 1 HF= 1/ 2πf დ 2 α 1 რ ნ=1/(2·3,14·5000·2,0·16)=1,00 μF,
ლ 2 HF=რ ნ/ 2πf დ 2 α 2 =16/(2·3,14·5000·2,0)=0,25 mH.
ფილტრების შესატყვისად დინამიკების შეყვანის წინაღობასთან, შეიძლება გამოყენებულ იქნას სპეციალური შესატყვისი წრე. ამ მიკროსქემის არარსებობის შემთხვევაში, დინამიკის შეყვანის წინაღობა გავლენას ახდენს კროსვორდის ფილტრების სიხშირეზე და ფაზურ რეაქციაზე. დინამიკთან პარალელურად დაკავშირებული შესატყვისი მიკროსქემის ელემენტების პარამეტრები ნაპოვნია მდგომარეობიდან:
ი გ(ს )+ ი გრ(ს )=1/ რ ე,
სად ი გ(ს ) - შესატყვისი წრედის გამტარობა, ი გრ(ს ) - დინამიკის შეყვანის გამტარობა, რ ე- დინამიკის ელექტრული წინააღმდეგობა პირდაპირი დენის დროს.
შესატყვისი მიკროსქემის დიაგრამა ნაჩვენებია ნახ.3-ზე. წრე ორმაგია დინამიკის ეკვივალენტურ წრედთან. მიკროსქემის ელემენტების მნიშვნელობები განისაზღვრება შემდეგნაირად:
რ კ 1 = რ ე,
C კ 1 = ლ V.C./ რ ე 2
რ კ=რ E 2 / რ ES = ქ ES რ E/ ქᲥᲐᲚᲑᲐᲢᲝᲜᲘ.
C კ=ლ CES/ რ E 2 =1/ ქ ES რ E 2π ვ ს,
ლ კ=Cსამინისტროსრ ე 2 =ქ ES რ E/2π ვ ს,
სად ლ V.C.- ხმის კოჭის ინდუქციურობა, ვ ს, C სამინისტროს, ლ CES, რ ES- დინამიკის ელექტრომექანიკური პარამეტრები.
დაბალი სიხშირის დინამიკის შეყვანის წინაღობის კომპენსაციისთვის გამოიყენება გამარტივებული წრე, რომელიც შედგება სერიით დაკავშირებული რეზისტორებისგან. რ K1და კონტეინერები C K1. ეს იმის გამო ხდება, რომ დინამიკის მექანიკური რეზონანსი გავლენას არ ახდენს დაბალი გამტარი ფილტრის მახასიათებლებზე და მხოლოდ ანაზღაურებს დინამიკის შეყვანის წინაღობის ინდუქციურ ხასიათს. მიზანშეწონილია დააკავშიროთ სრული შესატყვისი ქსელი მაღალი სიხშირის და საშუალო დიაპაზონის დინამიკებთან, თუ დინამიკის რეზონანსული სიხშირე ახლოს არის მაღალგამტარი ფილტრის გამორთვის სიხშირესთან ან გამტარი ფილტრის დაბალ გამორთვის სიხშირესთან. იმ შემთხვევაში, თუ ფილტრების გათიშვის სიხშირეები მნიშვნელოვნად აღემატება დინამიკების რეზონანსულ სიხშირეებს, საკმარისია გამარტივებული მიკროსქემის ჩართვა.
ნახ.3. შესაბამისი მიკროსქემის დიაგრამა დინამიკის შეყვანის წინაღობის რთული ბუნების კომპენსაციისთვის
დინამიკების შეყვანის კომპლექსური წინაღობის გავლენა შეიძლება ჩაითვალოს მეორე რიგის გამყოფი ფილტრების მაგალითის გამოყენებით მაღალი და დაბალი სიხშირეებისთვის (ნახ. 4).
ბრინჯი. 4.დინამიკის ელექტრული ეკვივალენტური წრე მეორე რიგის გადაკვეთის ფილტრებით: a – დაბალი გამტარი ფილტრით; ბ – მაღალგამტარი ფილტრით; (1 - ფილტრი; 2 - დინამიკი)
დაბალი სიხშირის დინამიკის პარამეტრები ისეა შერჩეული, რომ მისი სიხშირის პასუხი შეესაბამებოდეს ბატერვორტის მიახლოებას, ე.ი. სრული ხარისხის ფაქტორი ქ ც =0.707. დაბალი გამტარი ფილტრის გამორთვის სიხშირე არჩეულია დინამიკის რეზონანსულ სიხშირეზე 10-ჯერ ვ d =10 ვს. ხმის კოჭის ინდუქციურობა არჩეულია მდგომარეობიდან: Q VC=0.1, სადაც ქ V.C.- ხმის ხვეულის ხარისხის ფაქტორი, რომელიც განისაზღვრება, როგორც:
ქ V.C.=ლ VC 2 π ვ ს/ რ ე,
სად ფს - დინამიკის რეზონანსული სიხშირე, რ E - ხმის კოჭის DC წინააღმდეგობა, L VC- ხმის კოჭის ინდუქციურობა.
მნიშვნელობა ქ V.C.=0.1 შეესაბამება მძლავრი დაბალი სიხშირის დინამიკების ხმის ხვეულის ინდუქციურობის საშუალო მნიშვნელობას. შედეგად, შეგვიძლია ვივარაუდოთ, რომ ხმის კოჭის ინდუქციურობა ლ V.C.და აქტიური წინააღმდეგობა რ ედაკავშირებულია ფილტრის ავზთან პარალელურად C 1 და აყალიბებს ფართო მაქსიმუმს შეყვანის წინააღმდეგობის სიხშირის პასუხში ფილტრის გათიშვის სიხშირის რეგიონში, რასაც მოჰყვება მკვეთრი დაწევა (ნახ. 5a). ძაბვის ფილტრის სიხშირეზე რეაგირების შესაბამისი ცვლილებები შედგება სიხშირეზე რეაგირების უმნიშვნელო მატებით. ვ ≈ 2 ვ ს(ხმის ხვეულის ინდუქციურობის გამო) და გლუვი ჩაძირვა, რასაც მოჰყვება სიხშირის პასუხის მკვეთრი პიკი ხმოვანი კოჭის ინდუქციურობით და კროსვორდის ფილტრის ტევადობით წარმოქმნილი მიკროსქემის რეზონანსის გამო. სიხშირის პასუხის შესაბამისი ცვლილებები და ზ BX სერიასთან დაკავშირებული რეზისტორიდან და კონდენსატორიდან შესატყვისი წრედის ჩართვის შემდეგ ნაჩვენებია ნახ. 5, a (მრუდები 2, 4, 6). შესატყვისი მიკროსქემის ჩართვა აახლოებს დინამიკის შეყვანის წინაღობის ბუნებას აქტიურს და იზოლაციის ფილტრის სიხშირის რეაქციას ძაბვაში სასურველთან. თუმცა, ხმის კოჭის ინდუქციურობის გავლენის გამო, სიხშირის პასუხი ხმის წნევის თვალსაზრისით განსხვავდება სასურველისგან (მრუდი 4), შესაბამისად, შესატყვისი მიკროსქემის შემდეგაც კი, ფილტრის ელემენტებისა და შესატყვისი მიკროსქემის უმნიშვნელო რეგულირება ხდება. ზოგჯერ საჭიროა.
ბრინჯი. 5დინამიკზე დატვირთული მე-2 რიგის საიზოლაციო ფილტრების სიხშირის პასუხი და შეყვანის წინაღობა: ა) დაბალი გამტარი ფილტრი; ბ) მაღალგამტარი ფილტრი;
- ძაბვის სიხშირის პასუხი ფილტრის გამომავალზე შესატყვისი მიკროსქემის გარეშე;
- ძაბვის სიხშირის პასუხი ფილტრის გამოსავალზე შესატყვისი სქემით;
- სიხშირის პასუხი ხმის წნევაზე შესატყვისი მიკროსქემის გარეშე;
- სიხშირის რეაგირება ხმის წნევაზე შესატყვისი სქემით;
- ფილტრის შეყვანის წინაღობა დინამიკთან შესატყვისი მიკროსქემის გარეშე;
- ფილტრის შეყვანის წინაღობა დინამიკთან შესატყვისი ქსელით.
მაღალგამტარი ფილტრის შემთხვევაში, დინამიკის შეყვანის წინაღობის რთული ბუნების გავლენა ფილტრის შეყვანის წინაღობაზე და სიხშირის პასუხზე განსხვავებული ხასიათისაა. თუ მაღალგამტარი ფილტრის გამორთვის სიხშირე დინამიკის რეზონანსის სიხშირესთან ახლოსაა ვ ს(შემთხვევა, რომელიც ზოგჯერ გვხვდება საშუალო დონის დინამიკების ფილტრებში, მაგრამ პრაქტიკულად შეუძლებელია მაღალი სიხშირის დინამიკებისთვის), მაღალგამტარი ფილტრის შეყვანის წინაღობა დინამიკთან შესატყვისი ქსელის გარეშე შეიძლება ჰქონდეს ღრმა ჩავარდნა იმის გამო, რომ დინამიკზე რეზონანსული სიხშირე ვ სმისი შეყვანის წინაღობა მნიშვნელოვნად იზრდება და არის წმინდა აქტიური. როგორც ჩანს, ფილტრი უმოქმედოა, დატვირთვის წინააღმდეგობის მკვეთრი ზრდის გამო და მისი შეყვანის წინააღმდეგობა განისაზღვრება სერიულად დაკავშირებული ელემენტებით. C 1 , ლ 1 . უფრო გავრცელებული სიტუაციაა მაღალი გამტარი ფილტრის გამორთვის სიხშირე ვ d მნიშვნელოვნად აღემატება დინამიკის რეზონანსულ სიხშირეს ვ ს. სურათი 5b გვიჩვენებს დინამიკის შეყვანის წინაღობის გავლენის მაგალითს და მის კომპენსაციას მაღალგამტარი ფილტრის სიხშირეზე ძაბვისა და ხმის წნევის მიხედვით. ფილტრის გამორთვის სიხშირე არჩეულია დინამიკის რეზონანსის სიხშირეზე მნიშვნელოვნად ვ დ≈8 ვ ს, დინამიკის პარამეტრები ქ თ.ს.=1,5 , ქ ᲥᲐᲚᲑᲐᲢᲝᲜᲘ=10, ქ VC =0.08.მაღალი სიხშირის რეგიონში ბგერის წნევისა და ძაბვის სიხშირის პასუხის ზრდა, რომელსაც თან ახლავს შეყვანის წინაღობის ვარდნა, აიხსნება ხმის კოჭის ინდუქციურობის გავლენით. ლ V.C.. უფრო მაღალ სიხშირეებზე, სიხშირის პასუხი ეცემა და შეყვანის წინაღობა იზრდება ხმის კოჭის ინდუქციური რეაქციის გაზრდის გამო.
მრუდები 2, 4, 6 ნახ. 5b-ზე გვიჩვენებს შესატყვისობის გავლენას რ.- ჯაჭვები.
მაღალგამტარი კროსვორდის ფილტრის გამომავალი წინაღობა, რომელიც იზრდება სიხშირის კლებასთან ერთად, გავლენას ახდენს დინამიკის ელექტრულ ხარისხის ფაქტორზე, ზრდის მას და შესაბამისად ზრდის საერთო ხარისხის ფაქტორს და სიხშირის პასუხის ფორმას ხმის წნევის თვალსაზრისით. სხვა სიტყვებით რომ ვთქვათ, არსებობს დინამიკის „დამშრალის“ ეფექტი. ამის მისაღწევად, თქვენ უნდა აირჩიოთ ფილტრის სიხშირის პასუხის დახრილობა და მაღალი გამტარი ფილტრის ათვლის სიხშირე. ვ დ>> ვ სისე რომ რეზონანსის სიხშირეზე ვ სსიგნალის შესუსტება იყო მინიმუმ 20 დბ.
ზემოთ განხილულ მაგალითში საიზოლაციო ფილტრების გაანგარიშებისას ჩავთვალეთ, რომ დატვირთვის ბუნება აქტიურია, ამიტომ ჩვენ გამოვთვლით შესატყვის სქემებს, რომლებიც ანაზღაურებენ დინამიკის შეყვანის წინაღობის კომპლექსურ ბუნებას.
დაბალი სიხშირის და საშუალო სიხშირის არხების გადაკვეთის სიხშირე ვ დ 1 არჩეულია დაახლოებით ორი ოქტავის ზემოთ საშუალო დიაპაზონის დინამიკის რეზონანსული სიხშირეზე და საშუალო სიხშირის და მაღალი სიხშირის არხების გადაკვეთის სიხშირეზე ვ დ 2 – ორი ოქტავა ტვიტერის რეზონანსული სიხშირეზე ზემოთ. გარდა ამისა, შეიძლება ვივარაუდოთ, რომ მაღალი სიხშირის დინამიკის ხმის კოჭის ინდუქციურობა უმნიშვნელოა სამუშაო სიხშირის დიაპაზონში და მისი იგნორირება შესაძლებელია (ეს მართალია მაღალი სიხშირის დინამიკების უმეტესობისთვის). ამ შემთხვევაში, შეგიძლიათ შემოიფარგლოთ გამარტივებული შესატყვისი მიკროსქემის გამოყენებით დაბალი სიხშირის და საშუალო სიხშირის დინამიკებისთვის.
მაგალითი.გაზომილი (ან განისაზღვრება შეყვანის წინაღობის სიხშირის პასუხის მრუდით) ხმოვანი კოჭის ინდუქციები: ვუფერი ლ V.C.=3·10 -3 გ=3 მჰ, საშუალო დონის დინამიკი ლ VC =0,5·10 -3 G=0,5 mH. შემდეგ კომპენსაციის სქემების ელემენტების ღირებულება გამოითვლება ფორმულების გამოყენებით და:
LF-სთვის: რ კ 1 – რ π =8 Ohm; თან K1 = ლ V.C./ რ 2 E = 3·10 -3 /64=47 μF
საშუალო დონისთვის: R' კ 1 = რ ე-8 Ohm; ერთად' K1 = ლ V.C./ რ 2 E =0.5·10 -3 /64=8.0 μF.
საშუალო სიხშირის დინამიკის სიხშირეზე პასუხის პიკია, რაც ზრდის დინამიკის მთლიანი სიხშირის პასუხის უთანასწორობას (ნახ. 2ა); ამ შემთხვევაში, მიზანშეწონილია ჩართოთ ამპლიტუდის კორექტორი. უარმყოფელი ელემენტი (ნახ. 6) გამოიყენება დინამიკების ან მთელი დინამიკის სისტემის სიხშირის პასუხის მწვერვალების გამოსასწორებლად. ამ ბმულს აქვს წმინდა აქტიური შეყვანის წინააღმდეგობა, რომელიც ტოლია დატვირთვის წინააღმდეგობას რჰდა, შესაბამისად, შეიძლება დაკავშირებული იყოს ფილტრსა და დინამიკს შორის კომპენსირებული შეყვანის წინაღობით. თუ რეჟექტორი შედის AC შესასვლელში, წრე შეიძლება გამარტივდეს, რადგან არ არის საჭირო ელემენტები C ქ, ლ ქ, რ ქბმულის შეყვანის წინაღობის აქტიური ბუნების უზრუნველყოფა. ელემენტების მნიშვნელობები გამოითვლება ფორმულების გამოყენებით:
რ კ≈ რ ჰ(10 -0,05 ნ -1),
ლ კ= რ კ∆ ვ /2π ვ 0 2 ,
C K =1/ ლ K 4 π 2 ვ 0 2 ,
C ქ= ლ კ/ რ ჰ 2 ,
ლ ქ= C კრ ჰ 2 ,
რ ქ= რ ჰ(1+ რ ჰ/ რ კ),
სად რ ჰ– დინამიკის წინაღობა (კომპენსირებული) ან დინამიკის შეყვანის წინაღობა (Ohm) უარმყოფელი რგოლის რეზონანსული სიხშირის რეგიონში;
∆ ვ – მორგებული სიხშირის პასუხის პიკის სიხშირის დიაპაზონი (გაზომილი დონის მიხედვით – 3 დბ), ჰც;
ვ 0 – ჭრილის რეზონანსული სიხშირე, ჰც;
ნ – სიხშირის პასუხის პიკის სიდიდე, dB.
ბრინჯი. 6.შემცირების ბმული: ა) სქემატური დიაგრამა; ბ) სიხშირის პასუხი
მოდით გამოვიყენოთ უარყოფის ბმული, რომელიც დაკავშირებულია ფილტრსა და საშუალო სიხშირის დინამიკს შორის შესაბამისი სქემით.
საშუალო სიხშირის დინამიკის სიხშირის პასუხიდან ჩვენ განვსაზღვრავთ ∆ ვ =1850 Hz, ვ 0 = 4000 ჰც, ნ =6 დბ. საშუალო დონის დინამიკის წინააღმდეგობა შესაბამისი ქსელით რ ჰ= 8 ომ.
საკონტროლო ბმულის ელემენტების მნიშვნელობები შემდეგია:
რ კ≈ რ ჰ(10 -0,05 ნ -1)=8(10 -0.05·6 -1)=7.96 Ohm,
ლ კ= რ კ∆ ვ /2π ვ 0 2 =7,96·1850/2 π (4000) 2 =0.147 mH,
C კ=1/ლ K 4 π 2 ვ 0 2 =1/1.47·10 -4 (2 π 4000) 2 =11 uF,
C ქ= ლ კ/ რ ჰ 2 =1.47·10 -4 /64=2.3 μF,
ლ ქ= C კრ ჰ 2 =10.8·10 -6 ·64=0.7 mH,
რ ქ= რ ჰ(1+ რ ჰ/ რ კ)=8(1+8/7.96)≈16.0 Ohm.
განხილულ მაგალითში, მაღალი სიხშირის და საშუალო სიხშირის დინამიკის სიხშირის პასუხს აქვს საშუალო დონეები, რომლებიც არის დაახლოებით 6 dB და, შესაბამისად, 3 dB უფრო მაღალი ვიდრე დაბალი სიხშირის დინამიკის სიხშირის პასუხი (ხმის წნევა დაფიქსირდა როდესაც ყველა დინამიკზე ერთნაირი სიდიდის სინუსოიდური ძაბვა იყო გამოყენებული). ამ შემთხვევაში, დინამიკის მთლიანი სიხშირის პასუხის უთანასწორობის შესამცირებლად, საჭიროა შუა სიხშირის და მაღალი სიხშირის კომპონენტების დონის შესუსტება. ეს შეიძლება გაკეთდეს ან პირველი რიგის მაკორექტირებელი მაღალი სიხშირის ბმულის გამოყენებით (ნახ. 7), რომლის ელემენტები გამოითვლება ფორმულების გამოყენებით:
რ კ≈ რ ჰ(10 -0,05 ნ -1),
ლ კ= რ კ/2π ვ დ√(10 0,1 ნ -2), ნ≥3 დბ,
ან L- ფორმის პასიური ატენუატორების გამოყენება, რომლებიც უზრუნველყოფენ შესუსტების მოცემულ დონეს ნ (dB) და მითითებული შეყვანის წინაღობა რ BX(ნახ. 8). დამამშვიდებელი ელემენტების ღირებულება გამოითვლება ფორმულების გამოყენებით:
რ 1 ≈ რ BX(1-10 -0,05 ნ ),
რ 2 ≈ რ ჰრ BX10 -0,05 ნ /(რ ჰ– რ BX10 -0,05 ნ ).
ბრინჯი. 7. 1-ლი რიგის ბმული, მაღალი სიხშირეების გასწორება: ა) მიკროსქემის დიაგრამა; ბ) სიხშირის პასუხი
ბრინჯი. 8.პასიური L- ფორმის დამამშვიდებელი
მაგალითად, მოდით გამოვთვალოთ ატენუატორის ელემენტების მნიშვნელობები მაღალი სიხშირის დინამიკის სიგნალის შესამცირებლად 6 დბ-ით. დინამიკის შემავალი წინაღობა ჩართული ატენუატორის ტოლი იყოს დინამიკის შემავალი წინაღობის, ე.ი. 16 Ohm, მაშინ:
რ 1 ≈16(1-10 -0.05·6)≈8.0 Ohm,რ 2 ≈16·10 -0,05·6 /(1-10 -0,05·6)≈16,0 ომ.
მოდით ანალოგიურად გამოვთვალოთ დამამშვიდებელი ელემენტების მნიშვნელობები საშუალო სიხშირის დინამიკისთვის: რ 1 = 4.7 Ohm, რ 2 =39 Ohm. ატენუატორები ჩართულია დინამიკების შემდეგ, შესაბამისი სქემებით.
საიზოლაციო ფილტრების სრული წრე ნაჩვენებია ნახ.9-ზე, დინამიკის სიხშირის პასუხი გამოთვლილ ფილტრებთან ნაჩვენებია ნახ.2, გ.
როგორც ზემოთ აღინიშნა, თანაბარი რიგის ფილტრები იძლევა მხოლოდ ერთ ვარიანტს დინამიკების გადართვის პოლარობისთვის; კერძოდ, მეორე რიგის ფილტრები საჭიროებენ გადართვას ანტიფაზაში. განხილული მაგალითისთვის, დაბალი სიხშირის და მაღალი სიხშირის დინამიკებს უნდა ჰქონდეთ გადართვის იდენტური პოლარობა, ხოლო შუა სიხშირის დინამიკს უნდა ჰქონდეს საპირისპირო პოლარობა. დინამიკების პოლარობის მოთხოვნები ზემოთ იყო განხილული დინამიკის მოდელზე იდეალური დინამიკებით. ამიტომ, რეალური დინამიკების ჩართვისას, რომლებსაც აქვთ საკუთარი ფაზური პასუხი ≠0 (გადაკვეთის სიხშირეების არჩევის შემთხვევაში დინამიკების ოპერაციული დიაპაზონის სასაზღვრო სიხშირეების მახლობლად ან როდესაც დინამიკების სიხშირის პასუხი ძალზე არათანაბარია), პირობა არხების რეალური ფაზის პასუხის შესატყვისი შეიძლება არ დაკმაყოფილდეს. მაშასადამე, ფილტრებით დინამიკების ხმის წნევისგან რეალური ფაზის რეაქციის მონიტორინგისთვის აუცილებელია ფაზის მრიცხველის გამოყენება დაყოვნების ხაზით ან შესატყვისი მდგომარეობის ირიბად განსაზღვრა არხის განცალკევებაში დინამიკების მთლიანი სიხშირის პასუხის ბუნებით. ბენდები. დინამიკების ჩართვის სწორი პოლარობა შეიძლება ჩაითვალოს ის, რომელიც შეესაბამება არხის განცალკევების ზოლში მთლიანი სიხშირის პასუხის ნაკლებ უთანასწორობას. განცალკევებული არხების ფაზური პასუხის ზუსტი შეხამება ყველა სხვა მოთხოვნის დაკმაყოფილებისას (ბრტყელი სიხშირის პასუხი და ა.შ.) ხორციელდება კომპიუტერზე ოპტიმალური გამყოფი ფილტრ-კორექტორების სინთეზირების რიცხვითი მეთოდების გამოყენებით.
ნახ.9.დინამიკის სქემატური დიაგრამა გამოთვლილი იზოლაციის ფილტრებით (ტევადობა მიკროფარადებში, ინდუქციურობა მილიჰენრიებში, წინააღმდეგობა ომებში).
პასიური იზოლაციის ფილტრების შემუშავებაში მნიშვნელოვან როლს თამაშობს მათი დიზაინი, ასევე კონკრეტული ელემენტების ტიპის არჩევანი - კონდენსატორები, ინდუქტორები, რეზისტორები, კერძოდ, ინდუქტორების შედარებითი განლაგება დიდ გავლენას ახდენს ფილტრების მქონე დინამიკების მახასიათებლები; თუ ისინი ცუდად არიან განლაგებული ურთიერთდაკავშირების გამო, ჩარევა შესაძლებელია სიგნალი მჭიდროდ დაშორებულ ხვეულებს შორის. ამ მიზეზით, რეკომენდირებულია მათი ორმხრივად პერპენდიკულურად განთავსება; მხოლოდ ასეთ განლაგებას შეუძლია შეამციროს მათი გავლენა ერთმანეთზე. ინდუქტორები პასიური შეერთების ფილტრების ერთ-ერთი ყველაზე მნიშვნელოვანი კომპონენტია. ამჟამად, ბევრი უცხოური კომპანია იყენებს მაგნიტური მასალისგან დამზადებულ ბირთვით ინდუქტორებს, რომლებიც უზრუნველყოფენ დიდ დინამიურ დიაპაზონს, არაწრფივი დამახინჯების დაბალ დონეს და ხვეულების მცირე ზომებს. ამასთან, მაგნიტური ბირთვით ხვეულების დიზაინი გულისხმობს სპეციალური მასალების გამოყენებას, ასე რომ, აქამდე ბევრი დეველოპერი იყენებს ხვეულებს ჰაერის ბირთვით, რომელთა მთავარი მინუსი არის დიდი ზომები დაბალი დანაკარგებით (განსაკუთრებით დაბალი სიხშირის არხის ფილტრში). ასევე სპილენძის მაღალი მოხმარება; უპირატესობები - უმნიშვნელო არაწრფივი დამახინჯებები.
ნახ. 10-ში ნაჩვენები ჰაერის ბირთვის ინდუქტორის კონფიგურაცია ოპტიმალურია, რადგან ის უზრუნველყოფს მაქსიმალურ თანაფარდობას ლ/რ , ე.ი. კოჭა მოცემული ინდუქციით ლ , შერჩეული დიამეტრის მავთულით გადაჭრილი, აქვს ყველაზე ნაკლები წინააღმდეგობა გრაგნილის მოცემული კონფიგურაციისთვის რ ან უმაღლესი ხარისხის ფაქტორი ნებისმიერ სხვასთან შედარებით. დამოკიდებულება ლ/რ , რომელსაც აქვს დროის განზომილება, დაკავშირებულია ხვეულის ზომებთან მიმართებით:
ლ /რ=161,7ალკ/(6ა+9ლ+10გ);
ლ- მიკროჰენრიში, რ- ომში, ა,ლ,გ - მილიმეტრებში.
სურ. 10.ინდუქტორის კოჭა ოპტიმალური კონფიგურაციის საჰაერო ბირთვით: ა) განყოფილებაში; ბ) გარეგნობა.
დიზაინის კოეფიციენტები ამ კოჭის კონფიგურაციისთვის: ა=1,5თან , ლ=გ ; კოჭის დიზაინის პარამეტრი გ=√(ლ/რ 8,66) , მოხვევების რაოდენობა ნ=19,88√(ლ / გ ), მავთულის დიამეტრი მილიმეტრებში, დ=0,841გ/√ ნ მავთულის მასა (მასალა - სპილენძი) გრამებში, ქ = გ 3 /21, მავთულის სიგრძე მილიმეტრებში, B=187.3√ლკ . თუ ინდუქტორი გამოითვლება მოცემული დიამეტრის მავთულის საფუძველზე, ძირითადი გაანგარიშების კოეფიციენტები შემდეგია:
დიზაინის პარამეტრი გ = 5 √(დ 4 19,88 2 ლ /0,841 4)=3,8 5 √(დ 4 ლ ) , მავთულის წინააღმდეგობა რ=ლ/გ 2 8,66 .
მოდით ვიპოვოთ, მაგალითად, ადრე გამოთვლილი დაბალი გამტარი ფილტრის ინდუქტორის პარამეტრები. კოჭის ინდუქციურობა არის ლ 1LF =5.1 მგ. წინააღმდეგობა რ DC კოჭები განისაზღვრება დასაშვები სიგნალის შესუსტებიდან, რომელიც შემოტანილია რეალური კოჭის მიერ დაბალ სიხშირეებზე. დაე, სიგნალი შესუსტდეს დანაკარგების გამო რ კოჭში არის ნ≤1dB. ვინაიდან ვუფერის DC წინააღმდეგობა არის რე=8 Ohm, შემდეგ დასაშვები კოჭის წინააღმდეგობა, რომელიც განისაზღვრება გამოხატულებიდან რ≤რ E (10 0.05 ნ -1), შეადგენს რ≤0,980 ohm; შემდეგ კოჭის დიზაინის პარამეტრი გ =√5100/0.98·8.66=24.5 მმ; მონაცვლეობის რაოდენობა ნ=19.8√(5100/24.5)=287 ბრუნი; მავთულის დიამეტრი დ=0,841·24,5/√287=1,2მმ; მავთულის წონა ქ =24,5 3 /21,4≈697 გ; მავთულის სიგრძე ბ =187,3√(85,1·24,5)≈46 მ.
პასიური შეერთების ფილტრების კიდევ ერთი მნიშვნელოვანი ელემენტია კონდენსატორები. როგორც წესი, ფილტრებში გამოიყენება ქაღალდის ან ფილმის კონდენსატორები. ყველაზე ხშირად გამოყენებული ქაღალდის კონდენსატორებია შიდა MBGO კონდენსატორები. ამ ტიპის კონდენსატორების უპირატესობაა დაბალი დანაკარგები, მაღალი ტემპერატურის სტაბილურობა, მინუსი არის დიდი ზომები, დასაშვები მაქსიმალური ძაბვის დაქვეითება მაღალ სიხშირეებზე. ამჟამად, რიგი უცხო დინამიკების ფილტრები იყენებენ ელექტროლიტურ არაპოლარულ კონდენსატორებს დაბალი შიდა დანაკარგებით, რომლებიც აერთიანებს განხილული კონდენსატორების უპირატესობებს და არ შეიცავს მათ ნაკლოვანებებს.
წიგნის მასალებზე დაყრდნობით: "მაღალი ხარისხის აკუსტიკური სისტემები და რადიატორები"
(ალდოშინა I.A., Voishvillo A.G.)
ამ სტატიაში ვისაუბრებთ მაღალ და დაბალგამტარ ფილტრებზე, როგორ ხასიათდება ისინი და მათი სახეობები.
მაღალი და დაბალი გამტარი ფილტრები- ეს არის ელექტრული სქემები, რომლებიც შედგება ელემენტებისაგან, რომლებსაც აქვთ არაწრფივი სიხშირის პასუხი - განსხვავებული წინააღმდეგობა აქვთ სხვადასხვა სიხშირეზე.
სიხშირის ფილტრები შეიძლება დაიყოს მაღალგამტარი (მაღალგამტარი) და დაბალგამტარი (დაბალგამტარი) ფილტრებად. რატომ ამბობენ ადამიანები ხშირად "ზედა" და არა "მაღალ" სიხშირეებს? რადგან აუდიო ინჟინერიაში დაბალი სიხშირეები მთავრდება 2 კილოჰერცით და იწყება მაღალი სიხშირეები. და რადიოინჟინერიაში 2 კილოჰერცი არის კიდევ ერთი კატეგორია - ხმის სიხშირე, რაც ნიშნავს "დაბალ სიხშირეს"! აუდიო ინჟინერიაში არის კიდევ ერთი კონცეფცია - საშუალო სიხშირეები. ასე რომ, შუაგავლის ფილტრები, როგორც წესი, არის ან ორი დაბალი გამტარი და მაღალგამტარი ფილტრების კომბინაცია, ან სხვა სახის გამტარი ფილტრი.
კიდევ ერთხელ გავიმეოროთ:
დაბალი და მაღალი გამტარი ფილტრების და არა მხოლოდ ფილტრების, არამედ რადიო სქემების ნებისმიერი ელემენტის დასახასიათებლად, არსებობს კონცეფცია - ამპლიტუდა-სიხშირის პასუხი, ან სიხშირის პასუხი
სიხშირის ფილტრები ხასიათდება ინდიკატორებით
შეწყვეტის სიხშირე- ეს არის სიხშირე, რომლის დროსაც ფილტრის გამომავალი სიგნალის ამპლიტუდა მცირდება შეყვანის სიგნალიდან 0.7-მდე.
ფილტრის სიხშირის პასუხის დახრილობაარის ფილტრის მახასიათებელი, რომელიც გვიჩვენებს, თუ რამდენად მკვეთრად მცირდება ფილტრის გამომავალი სიგნალის ამპლიტუდა, როდესაც იცვლება შემავალი სიგნალის სიხშირე. იდეალურ შემთხვევაში, თქვენ უნდა იბრძოლოთ სიხშირის პასუხის მაქსიმალური (ვერტიკალური) შემცირებისთვის.
სიხშირის ფილტრები მზადდება რეაქტიული ელემენტებით - კონდენსატორები და ინდუქტორები. კონდენსატორის ფილტრებში გამოყენებული რეაქტანტები ( X C ) და ინდუქტორები ( XL ) დაკავშირებულია სიხშირესთან ქვემოთ მოცემული ფორმულებით:

უფრო ადვილია ფილტრების გამოთვლა ექსპერიმენტების ჩატარებამდე სპეციალური აღჭურვილობის (გენერატორები, სპექტრის ანალიზატორები და სხვა მოწყობილობები) გამოყენებით სახლში Microsoft Excel-ში მარტივი ავტომატური გაანგარიშების ცხრილის შედგენით (თქვენ უნდა შეძლოთ Excel-ში ფორმულებთან მუშაობა). მე ვიყენებ ამ მეთოდს ნებისმიერი სქემის გამოსათვლელად. ჯერ ვაკეთებ ცხრილს, ჩავსვამ მონაცემებს, ვიღებ კალკულაციას, რომელსაც გადავიტან ქაღალდზე სიხშირეზე პასუხის გრაფიკის სახით, ვცვლი პარამეტრებს და ისევ ვხატავ სიხშირეზე რეაგირების წერტილებს. ამ მეთოდით არ არის საჭირო „საზომი ხელსაწყოების ლაბორატორიის“ განლაგება; სიხშირის პასუხის გაანგარიშება და დახატვა სწრაფად ხორციელდება.
უნდა დავამატოთ, რომ ფილტრის გამოთვლა სწორი იქნება, როდესაც ეს წესი შესრულდება:
ფილტრის სიზუსტის უზრუნველსაყოფად, აუცილებელია, რომ ფილტრის ელემენტების წინაღობის მნიშვნელობა იყოს დაახლოებით ორი ბრძანებით ნაკლები (100-ჯერ) ფილტრის გამოსავალთან დაკავშირებული დატვირთვის წინააღმდეგობაზე. როგორც ეს განსხვავება მცირდება, ფილტრის ხარისხი უარესდება. ეს გამოწვეულია იმით, რომ დატვირთვის წინააღმდეგობა გავლენას ახდენს სიხშირის ფილტრის ხარისხზე. თუ არ გჭირდებათ მაღალი სიზუსტე, მაშინ ეს განსხვავება შეიძლება შემცირდეს 10-ჯერ.
სიხშირის ფილტრებია:
1. ერთელემენტიანი (კონდენსატორი - როგორც მაღალგამტარი ფილტრი, ან ინდუქტორი - როგორც დაბალი გამტარი ფილტრი);
2. L-ს ფორმის - გარეგნულად ისინი სხვა მიმართულებით მიმართულ ასო G-ს წააგავს;
3. T-ის ფორმის - გარეგნულად ისინი ასო T-ს ჰგავს;
4. U-ის ფორმა - გარეგნულად წააგავს ასო P-ს;
5. Multi-link - იგივე L- ფორმის ფილტრები, რომლებიც დაკავშირებულია სერიაში.
ერთი ელემენტის მაღალი და დაბალი გამტარი ფილტრები
როგორც წესი, ერთელემენტიანი მაღალი და დაბალი გამტარი ფილტრები გამოიყენება უშუალოდ ძლიერი აუდიო გამაძლიერებლების აკუსტიკური სისტემებში, თავად აუდიო დინამიკების ხმის გასაუმჯობესებლად.
ისინი სერიულად უკავშირდება დინამიურ თავებს. პირველ რიგში, ისინი იცავენ როგორც დინამიურ თავებს მძლავრი ელექტრული სიგნალისგან, ასევე გამაძლიერებელს დაბალი დატვირთვის წინააღმდეგობისგან, დამატებითი დინამიკებით დატვირთვის გარეშე, იმ სიხშირით, რომელსაც ეს დინამიკები არ აწარმოებენ. მეორეც, ისინი დაკვრას უფრო სასიამოვნოს ხდიან ყურისთვის.
ერთელემენტიანი ფილტრის გამოსათვლელად, თქვენ უნდა იცოდეთ დინამიური სათავე კოჭის რეაქტიულობა. გაანგარიშება ხდება ძაბვის გამყოფის ფორმულების გამოყენებით, რაც ასევე შეესაბამება L- ფორმის ფილტრს. ყველაზე ხშირად, ერთელემენტიანი ფილტრები შეირჩევა "ყურით". ტვიტერზე მაღალი სიხშირეების ხაზგასასმელად მასთან სერიულად დამონტაჟებულია კონდენსატორი, ხოლო დაბალი სიხშირის დინამიკზე (ან საბვუფერზე) დაბალი სიხშირის ხაზგასასმელად მასთან სერიულად უკავშირდება ჩოკი (ინდუქტორი). მაგალითად, 20...50 ვატი რიგის სიმძლავრეებით, ოპტიმალურია გამოიყენოთ 5...20 μF კონდენსატორი ტვიტერებისთვის, ხოლო როგორც ჩოკი დაბალი სიხშირის დინამიკისთვის, გამოიყენოთ კოჭის ჭრილობა მინანქრებული სპილენძით. მავთული, დიამეტრის 0,3...1,0 მმ, VHS ვიდეო კასეტიდან რგოლზე და შეიცავს 200...1000 ბრუნს. მითითებულია ფართო ლიმიტები, რადგან შერჩევა ინდივიდუალური საკითხია.
L- ფორმის ფილტრები
L- ფორმის მაღალი გამტარი ან დაბალი გამტარი ფილტრი- ძაბვის გამყოფი, რომელიც შედგება ორი ელემენტისგან, არაწრფივი სიხშირის პასუხით. L- ფორმის ფილტრისთვის გამოიყენება წრე და ძაბვის გამყოფის ყველა ფორმულა.
L- ფორმის სიხშირის ფილტრები კონდენსატორზე და რეზისტორზე
R 1 თან X C .

ასეთი ფილტრის მუშაობის პრინციპი: კონდენსატორი, რომელსაც აქვს დაბალი რეაქტიულობა მაღალ სიხშირეებზე, გადის დენს შეუფერხებლად, ხოლო დაბალ სიხშირეებზე მისი რეაქტიულობა მაქსიმალურია, ამიტომ მასში დენი არ გადის.
სტატიიდან "ძაბვის გამყოფი" ვიცით, რომ რეზისტორების მნიშვნელობები შეიძლება აღწერილი იყოს ფორმულებით:
 ან
ან 

X C და შეწყვეტის სიხშირე.
R 2 რეზისტორების წინააღმდეგობისთვის R 1 (X C ) შეესაბამება: R 2 / R 1 = 0.7 / 0.3 = 2.33 . ეს გულისხმობს: C = 1.16 / R 2 πf , სად ვ - ფილტრის სიხშირის პასუხის გათიშვის სიხშირე.
R 2 ძაბვის გამყოფი კონდენსატორზე თან , რომელსაც აქვს საკუთარი რეაქტიულობა X C .

ასეთი ფილტრის მუშაობის პრინციპი: კონდენსატორი, რომელსაც აქვს დაბალი რეაქტიულობა მაღალ სიხშირეებზე, გადააქვს მაღალი სიხშირის დენებს კორპუსში, ხოლო დაბალ სიხშირეებზე მისი რეაქტიულობა მაქსიმალურია, ამიტომ მასში დენი არ გადის.
სტატიიდან "ძაბვის გამყოფი" ვიყენებთ იგივე ფორმულებს:
ან
შეყვანის ძაბვის აღება როგორც 1 (ერთობა), ხოლო გამომავალი ძაბვის 0.7 (მნიშვნელობა, რომელიც შეესაბამება წყვეტას), იცოდეთ კონდენსატორის რეაქტიულობა, რომელიც უდრის:
ძაბვის მნიშვნელობების ჩანაცვლებით, ჩვენ ვპოულობთ X C და შეწყვეტის სიხშირე.
R 2 (X C ) რეზისტორის წინააღმდეგობის მიმართ R 1 შეესაბამება: R 2 / R 1 = 0.7 / 0.3 = 2.33 . ეს გულისხმობს: C = 1 / (4,66 x R 1 πf) , სად ვ - ფილტრის სიხშირის პასუხის გათიშვის სიხშირე.
L- ფორმის სიხშირის ფილტრები ინდუქტორზე და რეზისტორზე
მაღალი გამტარი ფილტრი მიიღება რეზისტორის შეცვლით R 2 ლ XL .

ასეთი ფილტრის მოქმედების პრინციპი: ინდუქციურობა, რომელსაც აქვს დაბალი რეაქტიულობა დაბალ სიხშირეებზე, აცილებს მათ კორპუსს, ხოლო მაღალ სიხშირეებზე მისი რეაქტიულობა მაქსიმალურია, ამიტომ მასში დენი არ გადის.
![]()
ძაბვის მნიშვნელობების ჩანაცვლებით, ჩვენ ვპოულობთ XL და შეწყვეტის სიხშირე.
როგორც მაღალი გამტარი ფილტრის შემთხვევაში, გამოთვლები შეიძლება გაკეთდეს საპირისპიროდ. იმის გათვალისწინებით, რომ ფილტრის გამომავალი ძაბვის ამპლიტუდა (როგორც ძაბვის გამყოფი) სიხშირეზე პასუხის გათიშვის სიხშირეზე უნდა იყოს შეყვანის ძაბვის 0.7, აქედან გამომდინარეობს, რომ რეზისტორების წინააღმდეგობის თანაფარდობა R 2 (XL ) რეზისტორის წინააღმდეგობის მიმართ R 1 შეესაბამება: R 2 / R 1 = 0.7 / 0.3 = 2.33 . ეს გულისხმობს: L = 1.16 R 1 / (πf) .
დაბალი გამტარი ფილტრი მიიღება რეზისტორის შეცვლით R 1 ძაბვის გამყოფი ინდუქტორზე ლ , რომელსაც აქვს საკუთარი რეაქტიულობა XL .

ასეთი ფილტრის მუშაობის პრინციპი: ინდუქტორი, რომელსაც აქვს დაბალი რეაქტიულობა დაბალ სიხშირეებზე, გადის დენს შეუფერხებლად, ხოლო მაღალ სიხშირეებზე მისი რეაქტიულობა მაქსიმალურია, ამიტომ მასში დენი არ გადის.
იგივე ფორმულების გამოყენებით სტატიიდან „ძაბვის გამყოფი“ და შეყვანის ძაბვის აღება 1 (ერთიანობა), ხოლო გამომავალი ძაბვის 0.7 (მნიშვნელობა, რომელიც შეესაბამება წყვეტას), იცოდეთ ინდუქტორის რეაქტიულობა, რომელიც უდრის:
![]()
ძაბვის მნიშვნელობების ჩანაცვლებით, ჩვენ ვპოულობთ XL და შეწყვეტის სიხშირე.
თქვენ შეგიძლიათ გააკეთოთ გამოთვლები საპირისპირო თანმიმდევრობით. იმის გათვალისწინებით, რომ ფილტრის გამომავალი ძაბვის ამპლიტუდა (როგორც ძაბვის გამყოფი) სიხშირეზე პასუხის გათიშვის სიხშირეზე უნდა იყოს შეყვანის ძაბვის 0.7, აქედან გამომდინარეობს, რომ რეზისტორების წინააღმდეგობის თანაფარდობა R 2 რეზისტორების წინააღმდეგობისთვის R 1 (XL ) შეესაბამება: R 2 / R 1 = 0.7 / 0.3 = 2.33 . ეს გულისხმობს: L = R 2 / (4,66 πf)
L- ფორმის სიხშირის ფილტრები კონდენსატორზე და ინდუქტორზე
მაღალი გამტარი ფილტრი მიიღება ჩვეულებრივი ძაბვის გამყოფისგან, არა მხოლოდ რეზისტორის შეცვლით R 1 კონდენსატორამდე თან , ასევე რეზისტორს R 2 დროსელზე ლ . ასეთ ფილტრს აქვს უფრო მნიშვნელოვანი სიხშირის შემცირება (უფრო მკვეთრი ვარდნა) სიხშირის პასუხში, ვიდრე ზემოთ ჩამოთვლილ ფილტრებს ეფუძნება რ.ან რ.ლ.ჯაჭვები.

როგორც ადრე გაკეთდა, ჩვენ ვიყენებთ იგივე გაანგარიშების მეთოდებს. კონდენსატორი თან , აქვს საკუთარი რეაქტიულობა X C და დროსელი ლ - რეაქტიულობა XL :
სხვადასხვა რაოდენობის მნიშვნელობების ჩანაცვლებით - ფილტრების ძაბვები, შემავალი ან გამომავალი წინააღმდეგობები, შეგვიძლია ვიპოვოთ თან და ლ , სიხშირეზე პასუხის გათიშვის სიხშირე. თქვენ ასევე შეგიძლიათ გააკეთოთ გამოთვლები საპირისპირო თანმიმდევრობით. ვინაიდან არსებობს ორი ცვლადი რაოდენობა - ინდუქცია და ტევადობა, ფილტრის შემავალი ან გამომავალი წინააღმდეგობის მნიშვნელობა ყველაზე ხშირად დგინდება ძაბვის გამყოფად სიხშირის პასუხის გათიშვის სიხშირეზე და ამ მნიშვნელობიდან გამომდინარე, ნაპოვნია დარჩენილი პარამეტრები. .
დაბალი გამტარი ფილტრი მიიღება რეზისტორის შეცვლით R 1 ძაბვის გამყოფი ინდუქტორზე ლ და რეზისტორი R 2 კონდენსატორამდე თან .

როგორც ადრე იყო აღწერილი, იგივე გაანგარიშების მეთოდები გამოიყენება ძაბვის გამყოფი ფორმულების და ფილტრის ელემენტების რეაქტიულობის მეშვეობით. ამ შემთხვევაში, ჩვენ ვატოლებთ რეზისტორის მნიშვნელობას R 1 დროსელის რეაქციისთვის XL , ა R 2 კონდენსატორის რეაქციამდე X C .
T- ფორმის მაღალი და დაბალი გამტარი ფილტრები
T- ფორმის მაღალი და დაბალი გამტარი ფილტრები არის იგივე L- ფორმის ფილტრები, რომლებსაც ემატება კიდევ ერთი ელემენტი. ამრიგად, ისინი გამოითვლება ისევე, როგორც ძაბვის გამყოფი, რომელიც შედგება ორი ელემენტისგან არაწრფივი სიხშირის პასუხით. და შემდეგ, გამოთვლილ მნიშვნელობას ემატება მესამე ელემენტის რეაქტიული მნიშვნელობა. T- ფორმის ფილტრის გამოთვლის კიდევ ერთი, ნაკლებად ზუსტი გზა იწყება L- ფორმის ფილტრის გაანგარიშებით, რის შემდეგაც L- ფორმის ფილტრის "პირველი" გამოთვლილი ელემენტის მნიშვნელობა იზრდება ან მცირდება ნახევარით - "განაწილებულია" ორს შორის. T- ფორმის ფილტრის ელემენტები. თუ ეს არის კონდენსატორი, მაშინ T-ფილტრში კონდენსატორების ტევადობის მნიშვნელობა გაორმაგებულია, ხოლო თუ ეს არის რეზისტორი ან ინდუქტორი, მაშინ ხვეულების წინააღმდეგობის ან ინდუქციურობის მნიშვნელობა განახევრდება. ფილტრების ტრანსფორმაცია ნაჩვენებია ფიგურებში. T- ფორმის ფილტრების თავისებურება ის არის, რომ L- ფორმის ფილტრებთან შედარებით, მათი გამომავალი წინააღმდეგობა უფრო დაბალი შუნტირების ეფექტს ახდენს ფილტრის უკან რადიო სქემებზე.






U- ფორმის მაღალი და დაბალი გამტარი ფილტრები
U- ფორმის ფილტრები არის იგივე L- ფორმის ფილტრები, რომლებსაც ფილტრის წინ ემატება კიდევ ერთი ელემენტი. ყველაფერი, რაც დაიწერა T- ფორმის ფილტრებისთვის, მართალია U- ფორმის ფილტრებისთვის, ერთადერთი განსხვავება ისაა, რომ L- ფორმის ფილტრებთან შედარებით, ისინი ოდნავ აძლიერებენ შუნტირების ეფექტს ფილტრის წინ არსებულ რადიოს სქემებზე.
როგორც T- ფორმის ფილტრების შემთხვევაში, U- ფორმის ფილტრების გამოსათვლელად გამოიყენება ძაბვის გამყოფი ფორმულები, პირველი ფილტრის ელემენტის დამატებითი შუნტის წინააღმდეგობის დამატებით. U- ფორმის ფილტრის გამოთვლის კიდევ ერთი, ნაკლებად ზუსტი მეთოდი იწყება L- ფორმის ფილტრის გაანგარიშებით, რის შემდეგაც L- ფორმის ფილტრის "ბოლო" გამოთვლილი ელემენტის მნიშვნელობა იზრდება ან მცირდება ნახევარით - "განაწილებულია" ორს შორის. U- ფორმის ფილტრის ელემენტები. T-ის ფორმის ფილტრისგან განსხვავებით, თუ ის არის კონდენსატორი, მაშინ P- ფილტრში კონდენსატორების ტევადობის მნიშვნელობა განახევრებულია, ხოლო თუ ეს არის რეზისტორი ან ინდუქტორი, მაშინ წინააღმდეგობის ან ინდუქციური მნიშვნელობა. ხვეულები გაორმაგებულია.






იმის გამო, რომ ინდუქტორების (ჩოკების) წარმოება მოითხოვს გარკვეულ ძალისხმევას და ზოგჯერ დამატებით ადგილს მათი განთავსებისთვის, უფრო მომგებიანია ფილტრების დამზადება კონდენსატორებისა და რეზისტორებისგან, ინდუქტორების გამოყენების გარეშე. ეს განსაკუთრებით ეხება აუდიო სიხშირეებს. ამრიგად, მაღალგამტარი ფილტრები, როგორც წესი, მზადდება T- ფორმის, ხოლო დაბალი გამტარი ფილტრები მზადდება U- ფორმის. ასევე არის შუაგადასული ფილტრები, რომლებიც, როგორც წესი, მზადდება L- ფორმის (ორი კონდენსატორისგან).
გამტარი რეზონანსული ფილტრები
გამტარი რეზონანსული სიხშირის ფილტრები შექმნილია გარკვეული სიხშირის დიაპაზონის იზოლირებისთვის ან უარსაყოფად. რეზონანსული სიხშირის ფილტრები შეიძლება შედგებოდეს ერთი, ორი ან სამი რხევითი სქემისგან, რომლებიც მორგებულია კონკრეტულ სიხშირეზე. რეზონანსულ ფილტრებს აქვთ ყველაზე ციცაბო მატება (ან ვარდნა) სიხშირის პასუხში სხვა (არარეზონანსულ) ფილტრებთან შედარებით. გამტარი რეზონანსული სიხშირის ფილტრები შეიძლება იყოს ერთელემენტიანი - ერთი წრედით, L- ფორმის - ორი სქემით, T და U- ფორმის - სამი სქემით, მრავალელემენტიანი - ოთხი ან მეტი სქემით.
 სურათზე ნაჩვენებია T- ფორმის გამტარი რეზონანსული ფილტრის დიაგრამა, რომელიც შექმნილია გარკვეული სიხშირის იზოლირებისთვის. იგი შედგება სამი რხევადი სქემისგან. C 1 L 1
და C 3 L 3
– სერიის რხევის სქემებს, რეზონანსულ სიხშირეზე აქვთ დაბალი წინააღმდეგობა დინების მიმართ, ხოლო სხვა სიხშირეებზე, პირიქით, აქვთ მაღალი წინააღმდეგობა. პარალელური წრე C 2 L 2
პირიქით, მას აქვს მაღალი წინააღმდეგობა რეზონანსულ სიხშირეზე, ხოლო დაბალი წინააღმდეგობა აქვს სხვა სიხშირეებზე. ასეთი ფილტრის გამტარუნარიანობის გასაფართოვებლად, ისინი ამცირებენ სქემების ხარისხის ფაქტორს, ცვლიან ინდუქტორების დიზაინს, ახდენენ სქემებს "მარჯვნივ, მარცხნივ" ცენტრალური რეზონანსულისგან ოდნავ განსხვავებულ სიხშირეზე, მიკროსქემის პარალელურად. C 2 L 2
შეაერთეთ რეზისტორი.
სურათზე ნაჩვენებია T- ფორმის გამტარი რეზონანსული ფილტრის დიაგრამა, რომელიც შექმნილია გარკვეული სიხშირის იზოლირებისთვის. იგი შედგება სამი რხევადი სქემისგან. C 1 L 1
და C 3 L 3
– სერიის რხევის სქემებს, რეზონანსულ სიხშირეზე აქვთ დაბალი წინააღმდეგობა დინების მიმართ, ხოლო სხვა სიხშირეებზე, პირიქით, აქვთ მაღალი წინააღმდეგობა. პარალელური წრე C 2 L 2
პირიქით, მას აქვს მაღალი წინააღმდეგობა რეზონანსულ სიხშირეზე, ხოლო დაბალი წინააღმდეგობა აქვს სხვა სიხშირეებზე. ასეთი ფილტრის გამტარუნარიანობის გასაფართოვებლად, ისინი ამცირებენ სქემების ხარისხის ფაქტორს, ცვლიან ინდუქტორების დიზაინს, ახდენენ სქემებს "მარჯვნივ, მარცხნივ" ცენტრალური რეზონანსულისგან ოდნავ განსხვავებულ სიხშირეზე, მიკროსქემის პარალელურად. C 2 L 2
შეაერთეთ რეზისტორი.
 ქვემოთ მოყვანილი ფიგურა გვიჩვენებს T- ფორმის დონის რეზონანსული ფილტრის დიაგრამას, რომელიც შექმნილია კონკრეტული სიხშირის ჩასახშობად. ის, ისევე როგორც წინა ფილტრი, შედგება სამი რხევითი სქემისგან, მაგრამ ასეთი ფილტრისთვის სიხშირის შერჩევის პრინციპი განსხვავებულია. C 1 L 1
და C 3 L 3
– პარალელურ რხევად სქემებს, რეზონანსულ სიხშირეზე აქვთ დიდი წინააღმდეგობა დინების მიმართ, ხოლო სხვა სიხშირეებზე – მცირე. პარალელური წრე C 2 L 2
პირიქით, მას აქვს დაბალი წინააღმდეგობა რეზონანსულ სიხშირეზე, მაგრამ აქვს მაღალი წინააღმდეგობა სხვა სიხშირეებზე. ამრიგად, თუ წინა ფილტრი ირჩევს რეზონანსულ სიხშირეს და თრგუნავს დარჩენილ სიხშირეებს, მაშინ ეს ფილტრი თავისუფლად გადის ყველა სიხშირეს გარდა რეზონანსული სიხშირისა.
ქვემოთ მოყვანილი ფიგურა გვიჩვენებს T- ფორმის დონის რეზონანსული ფილტრის დიაგრამას, რომელიც შექმნილია კონკრეტული სიხშირის ჩასახშობად. ის, ისევე როგორც წინა ფილტრი, შედგება სამი რხევითი სქემისგან, მაგრამ ასეთი ფილტრისთვის სიხშირის შერჩევის პრინციპი განსხვავებულია. C 1 L 1
და C 3 L 3
– პარალელურ რხევად სქემებს, რეზონანსულ სიხშირეზე აქვთ დიდი წინააღმდეგობა დინების მიმართ, ხოლო სხვა სიხშირეებზე – მცირე. პარალელური წრე C 2 L 2
პირიქით, მას აქვს დაბალი წინააღმდეგობა რეზონანსულ სიხშირეზე, მაგრამ აქვს მაღალი წინააღმდეგობა სხვა სიხშირეებზე. ამრიგად, თუ წინა ფილტრი ირჩევს რეზონანსულ სიხშირეს და თრგუნავს დარჩენილ სიხშირეებს, მაშინ ეს ფილტრი თავისუფლად გადის ყველა სიხშირეს გარდა რეზონანსული სიხშირისა.
გამტარი რეზონანსული ფილტრების გამოთვლის პროცედურა ეფუძნება იმავე ძაბვის გამყოფს, სადაც LC წრე თავისი დამახასიათებელი წინააღმდეგობით მოქმედებს როგორც ერთი ელემენტი. როგორ გამოითვლება რხევითი წრე, განისაზღვრება მისი რეზონანსული სიხშირე, ხარისხის ფაქტორი და დამახასიათებელი (ტალღის) წინაღობა, შეგიძლიათ იხილოთ სტატიაში



