ตัวควบคุมความเร็วมอเตอร์ไฟฟ้า: หลักการทำงาน ตัวควบคุมความเร็วมอเตอร์ของเครื่องมือไฟฟ้า - แผนภาพและหลักการทำงาน วิธีทำให้มอเตอร์ไฟฟ้าหมุน
ด้วยกลไกง่ายๆ จะสะดวกในการติดตั้งตัวควบคุมกระแสแบบอะนาล็อก ตัวอย่างเช่นสามารถเปลี่ยนความเร็วการหมุนของเพลามอเตอร์ได้ จากด้านเทคนิค การใช้ตัวควบคุมดังกล่าวทำได้ง่าย (คุณจะต้องติดตั้งทรานซิสเตอร์ตัวเดียว) เหมาะสำหรับการปรับความเร็วอิสระของมอเตอร์ในหุ่นยนต์และอุปกรณ์จ่ายไฟ ประเภทของหน่วยงานกำกับดูแลที่พบบ่อยที่สุดคือช่องทางเดียวและสองช่องทาง
วิดีโอหมายเลข 1ตัวควบคุมช่องสัญญาณเดียวในการทำงาน เปลี่ยนความเร็วในการหมุนของเพลามอเตอร์โดยการหมุนปุ่มตัวต้านทานแบบแปรผัน
วิดีโอหมายเลข 2 การเพิ่มความเร็วในการหมุนของเพลามอเตอร์เมื่อใช้งานตัวควบคุมช่องสัญญาณเดียว การเพิ่มจำนวนรอบจากค่าต่ำสุดไปเป็นค่าสูงสุดเมื่อหมุนปุ่มหมุนตัวต้านทานแบบแปรผัน
วิดีโอหมายเลข 3ตัวควบคุมสองช่องสัญญาณกำลังทำงาน การตั้งค่าความเร็วแรงบิดของเพลามอเตอร์โดยอิสระโดยอาศัยตัวต้านทานแบบทริมมิง
วิดีโอหมายเลข 4 วัดแรงดันไฟฟ้าที่เอาต์พุตของตัวควบคุมด้วยมัลติมิเตอร์แบบดิจิตอล ค่าผลลัพธ์จะเท่ากับแรงดันไฟฟ้าของแบตเตอรี่ซึ่งลบออกแล้ว 0.6 โวลต์ (ความแตกต่างเกิดขึ้นเนื่องจากแรงดันไฟฟ้าตกคร่อมทางแยกทรานซิสเตอร์) เมื่อใช้แบตเตอรี่ขนาด 9.55 โวลต์ จะมีการบันทึกการเปลี่ยนแปลงจาก 0 เป็น 8.9 โวลต์
หน้าที่และลักษณะสำคัญ
กระแสโหลดของหน่วยงานกำกับดูแลช่องเดียว (ภาพถ่าย 1) และสองช่อง (ภาพถ่าย 2) ไม่เกิน 1.5 A ดังนั้นเพื่อเพิ่มความสามารถในการรับน้ำหนักทรานซิสเตอร์ KT815A จะถูกแทนที่ด้วย KT972A หมายเลขพินสำหรับทรานซิสเตอร์เหล่านี้จะเหมือนกัน (e-k-b) แต่รุ่น KT972A ใช้งานได้กระแสสูงสุด 4A
ตัวควบคุมมอเตอร์ช่องเดียว
อุปกรณ์ควบคุมมอเตอร์หนึ่งตัวซึ่งขับเคลื่อนด้วยแรงดันไฟฟ้าในช่วง 2 ถึง 12 โวลต์
การออกแบบอุปกรณ์
องค์ประกอบการออกแบบหลักของตัวควบคุมแสดงอยู่ในรูปภาพ 3. อุปกรณ์ประกอบด้วยห้าองค์ประกอบ: ตัวต้านทานความต้านทานแบบแปรผันสองตัวที่มีความต้านทาน 10 kOhm (หมายเลข 1) และ 1 kOhm (หมายเลข 2) ทรานซิสเตอร์รุ่น KT815A (หมายเลข 3) สกรูสองส่วนคู่หนึ่ง เทอร์มินัลบล็อกสำหรับเอาต์พุตต่อมอเตอร์ (หมายเลข 4) และอินพุตสำหรับต่อแบตเตอรี่ (หมายเลข 5)
หมายเหตุ 1. ไม่จำเป็นต้องติดตั้งแผงขั้วต่อสกรู คุณสามารถเชื่อมต่อมอเตอร์และแหล่งพลังงานได้โดยตรงโดยใช้ลวดยึดเกลียวบาง
หลักการทำงาน
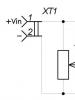
ขั้นตอนการทำงานของตัวควบคุมมอเตอร์อธิบายไว้ในแผนภาพไฟฟ้า (รูปที่ 1) โดยคำนึงถึงขั้วไฟฟ้า จะมีการจ่ายแรงดันไฟฟ้าคงที่ให้กับขั้วต่อ XT1 หลอดไฟหรือมอเตอร์เชื่อมต่อกับขั้วต่อ XT2 ตัวต้านทานปรับค่าได้ R1 เปิดอยู่ที่อินพุต การหมุนปุ่มจะเปลี่ยนศักย์ไฟฟ้าที่เอาต์พุตตรงกลาง ตรงข้ามกับค่าลบของแบตเตอรี่ ผ่านตัวจำกัดกระแส R2 เอาต์พุตตรงกลางจะเชื่อมต่อกับเทอร์มินัลฐานของทรานซิสเตอร์ VT1 ในกรณีนี้ ทรานซิสเตอร์จะเปิดตามวงจรกระแสปกติ ศักย์ไฟฟ้าเชิงบวกที่เอาท์พุตฐานจะเพิ่มขึ้นเมื่อเอาท์พุตตรงกลางเคลื่อนขึ้นด้านบนจากการหมุนอย่างราบรื่นของปุ่มตัวต้านทานปรับค่าได้ กระแสไฟฟ้าเพิ่มขึ้นซึ่งเกิดจากการลดความต้านทานของจุดเชื่อมต่อตัวสะสมและตัวปล่อยในทรานซิสเตอร์ VT1 ศักยภาพจะลดลงหากสถานการณ์กลับด้าน
 แผนภาพวงจรไฟฟ้า
แผนภาพวงจรไฟฟ้า วัสดุและรายละเอียด
ต้องใช้แผงวงจรพิมพ์ขนาด 20x30 มม. ทำจากแผ่นไฟเบอร์กลาสฟอยล์ด้านหนึ่ง (ความหนาที่อนุญาต 1-1.5 มม.) ตารางที่ 1 แสดงรายการส่วนประกอบวิทยุ
โน้ต 2. ตัวต้านทานแบบแปรผันที่จำเป็นสำหรับอุปกรณ์สามารถผลิตได้ทุกประเภทสิ่งสำคัญคือต้องสังเกตค่าความต้านทานปัจจุบันที่ระบุไว้ในตารางที่ 1
หมายเหตุ 3. ในการควบคุมกระแสที่สูงกว่า 1.5A ทรานซิสเตอร์ KT815G จะถูกแทนที่ด้วย KT972A ที่ทรงพลังกว่า (ด้วยกระแสสูงสุด 4A) ในกรณีนี้ไม่จำเป็นต้องเปลี่ยนการออกแบบแผงวงจรพิมพ์เนื่องจากการกระจายพินสำหรับทรานซิสเตอร์ทั้งสองจะเหมือนกัน
กระบวนการสร้าง
สำหรับงานต่อไป คุณจะต้องดาวน์โหลดไฟล์เก็บถาวรที่อยู่ท้ายบทความ แตกไฟล์แล้วพิมพ์ แบบควบคุม (ไฟล์) จะพิมพ์บนกระดาษมัน และแบบติดตั้ง (ไฟล์) จะพิมพ์บนแผ่นสำนักงานสีขาว (รูปแบบ A4)
ถัดไป ภาพวาดของแผงวงจร (หมายเลข 1 ในภาพที่ 4) ติดกาวเข้ากับรางที่มีกระแสไฟฟ้าอยู่ฝั่งตรงข้ามของแผงวงจรพิมพ์ (หมายเลข 2 ในภาพที่ 4) จำเป็นต้องเจาะรู (หมายเลข 3 ในภาพที่ 14) บนภาพวาดการติดตั้งในตำแหน่งการติดตั้ง ภาพวาดการติดตั้งติดอยู่กับแผงวงจรพิมพ์ด้วยกาวแห้งและรูจะต้องตรงกัน ภาพที่ 5 แสดง pinout ของทรานซิสเตอร์ KT815 
อินพุตและเอาต์พุตของขั้วต่อเทอร์มินัลบล็อกจะมีเครื่องหมายสีขาว แหล่งจ่ายแรงดันไฟฟ้าเชื่อมต่อกับแผงขั้วต่อผ่านคลิป ตัวควบคุมช่องสัญญาณเดียวที่ประกอบอย่างสมบูรณ์แสดงอยู่ในรูปภาพ เชื่อมต่อแหล่งพลังงาน (แบตเตอรี่ 9 โวลต์) ในขั้นตอนสุดท้ายของการประกอบ ตอนนี้คุณสามารถปรับความเร็วการหมุนของเพลาได้โดยใช้มอเตอร์ในการทำเช่นนี้คุณต้องหมุนปุ่มปรับตัวต้านทานแบบแปรผันได้อย่างราบรื่น
ในการทดสอบอุปกรณ์คุณจะต้องพิมพ์ภาพวาดของดิสก์จากไฟล์เก็บถาวร ถัดไปคุณต้องวางภาพวาดนี้ (หมายเลข 1) ลงบนกระดาษแข็งหนาและบาง (หมายเลข 2) จากนั้นใช้กรรไกรตัดแผ่นดิสก์ออก (หมายเลข 3)
ชิ้นงานที่ได้จะถูกพลิกกลับ (หมายเลข 1) และติดเทปพันสายไฟสีดำสี่เหลี่ยม (หมายเลข 2) ไว้ที่กึ่งกลางเพื่อให้พื้นผิวของเพลามอเตอร์ติดกับจานได้ดีขึ้น คุณต้องทำหลุม (หมายเลข 3) ดังที่แสดงในภาพ จากนั้นจึงติดตั้งดิสก์บนเพลามอเตอร์และเริ่มการทดสอบได้ ตัวควบคุมมอเตอร์ช่องเดียวพร้อมแล้ว!
ตัวควบคุมมอเตอร์สองช่องสัญญาณ
ใช้เพื่อควบคุมมอเตอร์คู่พร้อมกันอย่างอิสระ จ่ายไฟจากแรงดันไฟฟ้าตั้งแต่ 2 ถึง 12 โวลต์ กระแสโหลดได้รับการจัดอันดับสูงสุด 1.5A ต่อช่องสัญญาณ
การออกแบบอุปกรณ์
ส่วนประกอบหลักของการออกแบบแสดงในภาพที่ 10 และประกอบด้วย: ตัวต้านทานการตัดแต่งสองตัวสำหรับการปรับช่องที่ 2 (หมายเลข 1) และช่องที่ 1 (หมายเลข 2) บล็อกเทอร์มินัลสกรูสองส่วนสามตัวสำหรับเอาต์พุตไปที่ช่องที่ 2 มอเตอร์ (หมายเลข 3) สำหรับเอาต์พุตไปยังมอเตอร์ตัวที่ 1 (หมายเลข 4) และสำหรับอินพุต (หมายเลข 5)
หมายเหตุ:1 การติดตั้งแผงขั้วต่อสกรูเป็นทางเลือก คุณสามารถเชื่อมต่อมอเตอร์และแหล่งพลังงานได้โดยตรงโดยใช้ลวดยึดเกลียวบาง
หลักการทำงาน
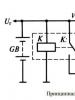
วงจรของตัวควบคุมสองช่องสัญญาณนั้นเหมือนกับวงจรไฟฟ้าของตัวควบคุมช่องสัญญาณเดียว ประกอบด้วยสองส่วน (รูปที่ 2) ข้อแตกต่างที่สำคัญ: ตัวต้านทานความต้านทานแบบแปรผันจะถูกแทนที่ด้วยตัวต้านทานแบบทริมเมอร์ ความเร็วในการหมุนของเพลาจะถูกตั้งค่าไว้ล่วงหน้า 
โน้ต 2. เพื่อปรับความเร็วในการหมุนของมอเตอร์อย่างรวดเร็ว ตัวต้านทานทริมเมอร์จะถูกแทนที่ด้วยลวดยึดที่มีตัวต้านทานความต้านทานแบบแปรผันพร้อมค่าความต้านทานที่ระบุในแผนภาพ
วัสดุและรายละเอียด
คุณจะต้องมีแผงวงจรพิมพ์ขนาด 30x30 มม. ทำจากแผ่นไฟเบอร์กลาสฟอยล์ด้านหนึ่งมีความหนา 1-1.5 มม. ตารางที่ 2 แสดงรายการส่วนประกอบวิทยุ
กระบวนการสร้าง
หลังจากดาวน์โหลดไฟล์เก็บถาวรที่อยู่ท้ายบทความแล้ว คุณจะต้องแตกไฟล์และพิมพ์ออกมา แบบร่างตัวควบคุมสำหรับการถ่ายเทความร้อน (ไฟล์ termo2) จะพิมพ์บนกระดาษมัน และแบบร่างการติดตั้ง (ไฟล์ montag2) จะพิมพ์บนแผ่นสำนักงานสีขาว (รูปแบบ A4)
การวาดแผงวงจรจะติดอยู่กับรางที่มีกระแสไฟฟ้าอยู่ฝั่งตรงข้ามของแผงวงจรพิมพ์ สร้างรูบนภาพวาดการติดตั้งในตำแหน่งการติดตั้ง ภาพวาดการติดตั้งติดอยู่กับแผงวงจรพิมพ์ด้วยกาวแห้งและรูจะต้องตรงกัน กำลังปักหมุดทรานซิสเตอร์ KT815 ในการตรวจสอบ คุณต้องเชื่อมต่ออินพุต 1 และ 2 ชั่วคราวด้วยสายยึด
อินพุตใดๆ เชื่อมต่อกับขั้วของแหล่งพลังงาน (ตัวอย่างแสดงแบตเตอรี่ขนาด 9 โวลต์) ขั้วลบของแหล่งจ่ายไฟติดอยู่ที่กึ่งกลางของแผงขั้วต่อ สิ่งสำคัญที่ต้องจำ: สายสีดำคือ “-” และสายสีแดงคือ “+”
มอเตอร์ต้องเชื่อมต่อกับแผงขั้วต่อสองตัว และต้องตั้งค่าความเร็วที่ต้องการด้วย หลังจากการทดสอบสำเร็จ คุณจะต้องลบการเชื่อมต่อชั่วคราวของอินพุตและติดตั้งอุปกรณ์บนโมเดลหุ่นยนต์ ตัวควบคุมมอเตอร์สองช่องสัญญาณพร้อมแล้ว!
มีการนำเสนอไดอะแกรมและภาพวาดที่จำเป็นสำหรับงานนี้ ตัวส่งของทรานซิสเตอร์จะมีลูกศรสีแดงกำกับไว้
เมื่อสตาร์ทมอเตอร์ไฟฟ้า การสิ้นเปลืองกระแสไฟจะเกิน 7 เท่า ซึ่งส่งผลให้ชิ้นส่วนไฟฟ้าและเครื่องกลของมอเตอร์เสียหายก่อนเวลาอันควร เพื่อป้องกันสิ่งนี้ คุณควรใช้ตัวควบคุมความเร็วของมอเตอร์ไฟฟ้า มีโมเดลที่ผลิตจากโรงงานมากมาย แต่เพื่อสร้างอุปกรณ์ดังกล่าวด้วยตัวเอง คุณจำเป็นต้องรู้หลักการทำงานของมอเตอร์ไฟฟ้าและวิธีควบคุมความเร็วของโรเตอร์
ข้อมูลทั่วไป
มอเตอร์ไฟฟ้ากระแสสลับแพร่หลายในกิจกรรมต่างๆ ของมนุษย์ เช่น รุ่นอะซิงโครนัส วัตถุประสงค์หลักของเครื่องยนต์ในฐานะเครื่องจักรไฟฟ้าคือ การเปลี่ยนพลังงานไฟฟ้าเป็นพลังงานกล. อะซิงโครนัสในการแปลหมายความว่าไม่พร้อมกัน เนื่องจากความเร็วของโรเตอร์แตกต่างจากความถี่ของแรงดันไฟฟ้ากระแสสลับ (U) ในสเตเตอร์ มอเตอร์อะซิงโครนัสมีสองประเภทตามประเภทของแหล่งจ่ายไฟ:
- เฟสเดียว
- สามเฟส.
เฟสเดียวใช้สำหรับความต้องการของครัวเรือนและใช้เฟสสามเฟสในการผลิต มอเตอร์แบบอะซิงโครนัสสามเฟส (ต่อไปนี้เรียกว่า TAM) ใช้โรเตอร์สองประเภท:
- ปิด;
- เฟส
มอเตอร์วงจรปิดคิดเป็นประมาณ 95% ของมอเตอร์ทั้งหมดที่ใช้และมีกำลังสูง (ตั้งแต่ 250 วัตต์ขึ้นไป) ประเภทของเฟสมีโครงสร้างแตกต่างจาก IMแต่มีการใช้งานค่อนข้างน้อยเมื่อเทียบกับครั้งแรก โรเตอร์เป็นรูปเหล็กทรงกระบอกที่วางอยู่ภายในสเตเตอร์ โดยมีแกนกดบนพื้นผิว
กรงกระรอกและโรเตอร์พันแผล
ทองแดงนำไฟฟ้าสูง (สำหรับเครื่องจักรกำลังสูง) หรือแท่งอะลูมิเนียม (สำหรับเครื่องจักรกำลังต่ำ) บัดกรีหรือเทลงในพื้นผิวของแกนกลางและลัดวงจรที่ปลายด้วยวงแหวนสองวงทำหน้าที่เป็นแม่เหล็กไฟฟ้าโดยที่ขั้วหันหน้าไปทางสเตเตอร์ แท่งขดลวดไม่มีฉนวนใด ๆ เนื่องจากแรงดันไฟฟ้าในขดลวดดังกล่าวเป็นศูนย์
โดยทั่วไปจะใช้กับแกนมอเตอร์กำลังปานกลาง อลูมิเนียมมีความหนาแน่นต่ำและมีค่าการนำไฟฟ้าสูง
เพื่อลดฮาร์โมนิกของแรงเคลื่อนไฟฟ้า (EMF) ที่สูงขึ้น และกำจัดการเต้นเป็นจังหวะของสนามแม่เหล็ก แท่งโรเตอร์มีมุมเอียงที่คำนวณได้สัมพันธ์กับแกนหมุน หากใช้มอเตอร์ไฟฟ้ากำลังต่ำ ร่องจะเป็นโครงสร้างปิดที่แยกโรเตอร์ออกจากช่องว่างเพื่อเพิ่มองค์ประกอบอุปนัยของความต้านทาน
โรเตอร์ในรูปแบบของการออกแบบเฟสหรือประเภทนั้นมีลักษณะเป็นขดลวดปลายของมันถูกเชื่อมต่อเป็นรูปดาวและติดกับวงแหวนสลิป (บนเพลา) ตามที่แปรงกราไฟท์เลื่อน เพื่อกำจัดกระแสน้ำวน พื้นผิวของขดลวดจะถูกปกคลุมด้วยฟิล์มออกไซด์ นอกจากนี้วงจรขดลวดโรเตอร์ยังเพิ่มตัวต้านทานซึ่งช่วยให้คุณสามารถเปลี่ยนความต้านทานแบบแอคทีฟ (R) ของวงจรโรเตอร์เพื่อลดค่าของกระแสไหลเข้า (Ip) กระแสเริ่มต้นส่งผลเสียต่อชิ้นส่วนไฟฟ้าและเครื่องกลของมอเตอร์ไฟฟ้า ตัวต้านทานแบบแปรผันที่ใช้ในการควบคุม Ip:
- โลหะหรือเหยียบด้วยการสลับแบบแมนนวล
- ของเหลว (เนื่องจากการแช่จนถึงความลึกของอิเล็กโทรด)
แปรงกราไฟท์อาจมีการสึกหรอ และบางรุ่นมีการออกแบบกรงกระรอกที่จะยกแปรงและปิดวงแหวนหลังจากที่มอเตอร์สตาร์ท IM ที่มีโรเตอร์โรเตอร์มีความยืดหยุ่นมากกว่าในแง่ของการควบคุม Ip
คุณสมบัติการออกแบบ
มอเตอร์แบบอะซิงโครนัสไม่มีขั้วที่เด่นชัด ต่างจากมอเตอร์ไฟฟ้ากระแสตรง จำนวนเสา กำหนดโดยจำนวนขดลวดในขดลวดชิ้นส่วนคงที่ (สเตเตอร์) และวิธีการเชื่อมต่อ ในเครื่องอะซิงโครนัสที่มี 4 คอยล์ ฟลักซ์แม่เหล็กจะผ่านไป สเตเตอร์ทำจากเหล็กแผ่นพิเศษ (เหล็กไฟฟ้า) ซึ่งช่วยลดกระแสไหลวนให้เป็นศูนย์ซึ่งทำให้เกิดความร้อนอย่างมากของขดลวด มันนำไปสู่การลัดวงจรอินเตอร์เทิร์นครั้งใหญ่
แร่เหล็กหรือแกนโรเตอร์ถูกกดลงบนเพลาโดยตรง มีช่องว่างอากาศขั้นต่ำระหว่างโรเตอร์และสเตเตอร์ ขดลวดโรเตอร์ทำในรูปแบบของ "กรงกระรอก" และทำจากแท่งทองแดงหรืออลูมิเนียม
ในมอเตอร์ไฟฟ้าที่มีกำลังสูงถึง 100 กิโลวัตต์ จะใช้อะลูมิเนียมซึ่งมีความหนาแน่นต่ำมาอุดร่องของแกนโรเตอร์ แต่ถึงแม้จะมีอุปกรณ์นี้ แต่เครื่องยนต์ประเภทนี้ก็ยังร้อนอยู่ เพื่อแก้ไขปัญหานี้ พัดลมใช้สำหรับระบายความร้อนแบบบังคับซึ่งติดตั้งอยู่บนเพลา เครื่องยนต์เหล่านี้เรียบง่ายและเชื่อถือได้ อย่างไรก็ตาม มอเตอร์ใช้กระแสไฟมากเมื่อสตาร์ท 7 เท่าของกระแสไฟที่กำหนด ด้วยเหตุนี้จึงมีแรงบิดเริ่มต้นต่ำ เนื่องจากพลังงานไฟฟ้าส่วนใหญ่จะไปทำความร้อนให้กับขดลวด
มอเตอร์ไฟฟ้าซึ่งมีแรงบิดเริ่มต้นเพิ่มขึ้นแตกต่างจากแบบอะซิงโครนัสทั่วไปในการออกแบบโรเตอร์ โรเตอร์ทำในรูปแบบของ "กรงกระรอก" คู่ โมเดลเหล่านี้คล้ายคลึงกับประเภทเฟสของการผลิตโรเตอร์ ประกอบด้วย "กรงกระรอก" ด้านในและด้านนอก และกรงด้านนอกเป็นกรงเริ่มต้นและมี R แอคทีฟขนาดใหญ่และขนาดเล็ก กรงด้านนอกมี R แอคทีฟเล็กน้อยและมีปฏิกิริยาสูง เมื่อความเร็วในการหมุนเพิ่มขึ้น ฉันจะเปลี่ยน ไปยังกรงด้านในและทำงานในรูปแบบของโรเตอร์กรงกระรอก
หลักการทำงาน
เมื่อฉันไหลผ่านขดลวดสเตเตอร์ แต่ละอันจะเกิดฟลักซ์แม่เหล็ก (F) F เหล่านี้ถูกเลื่อนไป 120 องศาซึ่งสัมพันธ์กัน ผลลัพธ์ F ที่กำลังหมุน สร้างแรงเคลื่อนไฟฟ้า (EMF)ในตัวนำอลูมิเนียมหรือทองแดง ด้วยเหตุนี้จึงเกิดโมเมนต์แม่เหล็กเริ่มต้นของมอเตอร์ไฟฟ้าและโรเตอร์เริ่มหมุน กระบวนการนี้เรียกอีกอย่างว่าสลิป (S) ในบางแหล่ง ซึ่งแสดงให้เห็นความต่างความถี่ n1 ของสนามแม่เหล็กไฟฟ้าของสตาร์ทเตอร์ ซึ่งจะมากกว่าความถี่ที่ได้รับเมื่อโรเตอร์ n2 หมุน คำนวณเป็นเปอร์เซ็นต์และมีรูปแบบ: S = ((n1-n2)/n1) * 100%
จำนวนโครงการที่ 1 - การควบคุมความเร็วไทริสเตอร์ของมอเตอร์สับเปลี่ยนโดยไม่สูญเสียพลังงาน
วงจรนี้ควบคุมโดยการเปิดหรือปิดไทริสเตอร์ (ไทรแอก) ในระหว่างการเปลี่ยนเฟสผ่านนิวทรัล เพื่อควบคุมมอเตอร์สับเปลี่ยนอย่างถูกต้องจะใช้วิธีการแก้ไขวงจร 1 ต่อไปนี้:
- การติดตั้งวงจรป้องกัน LRC ประกอบด้วยตัวเก็บประจุ ตัวต้านทาน และโช้ค
- การเพิ่มความจุที่อินพุต
- การใช้ไทริสเตอร์หรือไทรแอก ซึ่งกระแสเกินค่าพิกัดของกระแสมอเตอร์ในช่วง 3..8 เท่า
ตัวควบคุมประเภทนี้มีข้อดีและข้อเสีย ประการแรก ได้แก่ ต้นทุนต่ำ น้ำหนักและขนาดต่ำ คนที่สองมีดังต่อไปนี้:
- การใช้งานสำหรับมอเตอร์กำลังต่ำ
- มีเสียงดังและการกระตุกของมอเตอร์
- เมื่อใช้วงจรที่ใช้ไทรแอก ค่าคงที่ U จะกระทบกับมอเตอร์
ตัวควบคุมประเภทนี้ติดตั้งอยู่ในพัดลม เครื่องปรับอากาศ เครื่องซักผ้า และสว่านไฟฟ้า ทำหน้าที่ได้อย่างสมบูรณ์แบบแม้จะมีข้อบกพร่องก็ตาม
ประเภททรานซิสเตอร์
อีกชื่อหนึ่งของตัวควบคุมประเภททรานซิสเตอร์คือตัวแปลงอัตโนมัติหรือตัวควบคุม PWM (โครงการที่ 2) โดยจะเปลี่ยนค่าของ U ตามหลักการของการปรับความกว้างพัลส์ (PWM) โดยใช้สเตจเอาต์พุตที่ใช้ทรานซิสเตอร์ IGBT
จำนวนโครงการที่ 2 - ตัวควบคุมความเร็วทรานซิสเตอร์ PWM
การสลับทรานซิสเตอร์เกิดขึ้นที่ความถี่สูงและด้วยเหตุนี้จึงเป็นไปได้ที่จะเปลี่ยนความกว้างของพัลส์ ดังนั้นค่าของ U ก็จะเปลี่ยนไปด้วย ยิ่งชีพจรนานขึ้นและการหยุดชั่วคราวสั้นลง ค่าของ U ก็จะยิ่งสูงขึ้นและในทางกลับกัน ด้านบวกของการใช้ความหลากหลายนี้มีดังนี้:
- น้ำหนักเบาของอุปกรณ์ที่มีขนาดเล็ก
- ต้นทุนค่อนข้างต่ำ
- ที่ความเร็วต่ำจะไม่มีเสียงรบกวน
- ควบคุมผ่านค่า U ต่ำ (0..12 V)
ข้อเสียเปรียบหลักของการใช้งานคือระยะห่างจากมอเตอร์ไฟฟ้าไม่ควรเกิน 4 เมตร
การควบคุมความถี่
จำนวนโครงการที่ 3 - ตัวควบคุมความเร็วความถี่
อินเวอร์เตอร์แบบพิเศษมีข้อดีและข้อเสีย ข้อดีมีดังต่อไปนี้:
- การควบคุมความดันโลหิตโดยไม่ต้องมีการแทรกแซงของมนุษย์
- ความมั่นคง
- คุณลักษณะเพิ่มเติม.
สามารถควบคุมการทำงานของมอเตอร์ไฟฟ้าภายใต้เงื่อนไขบางประการได้ตลอดจนการป้องกันโหลดเกินและกระแสไฟฟ้าลัดวงจร นอกจากนี้ ยังสามารถขยายฟังก์ชันการทำงานได้โดยการเชื่อมต่อเซ็นเซอร์ดิจิทัล ตรวจสอบพารามิเตอร์การทำงาน และการใช้ตัวควบคุม PID ข้อเสียได้แก่ข้อจำกัดในการควบคุมความถี่และต้นทุนที่ค่อนข้างสูง
สำหรับ IM สามเฟสจะใช้อุปกรณ์ควบคุมความถี่ด้วย (Scheme 4) ตัวควบคุมมีสามเฟสที่เอาต์พุตสำหรับเชื่อมต่อมอเตอร์ไฟฟ้า
จำนวนโครงการที่ 4 - อินเวอร์เตอร์สำหรับมอเตอร์สามเฟส
ตัวเลือกนี้ก็มีจุดแข็งและจุดอ่อนเช่นกัน ประการแรกประกอบด้วยสิ่งต่อไปนี้: ต้นทุนต่ำ ทางเลือกของกำลังไฟ การควบคุมความถี่ที่หลากหลาย รวมถึงข้อดีทั้งหมดของตัวแปลงความถี่เฟสเดียว ในบรรดาด้านลบทั้งหมดสามารถระบุประเด็นหลักได้: การเลือกเบื้องต้นและการให้ความร้อนระหว่างการเริ่มต้น
การทำ DIY
หากไม่มีโอกาสหรือความปรารถนาที่จะซื้อตัวควบคุมแบบโรงงานคุณสามารถประกอบเองได้ แม้ว่าหน่วยงานกำกับดูแลประเภท "tda1085" จะพิสูจน์ตัวเองได้ดีมากก็ตาม ในการทำเช่นนี้ คุณต้องทำความคุ้นเคยกับทฤษฎีโดยละเอียดและเริ่มฝึกฝน วงจร Triac ได้รับความนิยมอย่างมาก โดยเฉพาะตัวควบคุมความเร็วของมอเตอร์อะซิงโครนัส 220V (แผนภาพที่ 5) การทำก็ไม่ยาก ประกอบโดยใช้ VT138 triac ซึ่งเหมาะอย่างยิ่งสำหรับวัตถุประสงค์เหล่านี้
จำนวนโครงการที่ 5 - ตัวควบคุมความเร็วอย่างง่ายบน triac
เครื่องควบคุมนี้ยังสามารถใช้เพื่อปรับความเร็วของมอเตอร์กระแสตรง 12 โวลต์ได้เนื่องจากค่อนข้างง่ายและเป็นสากล ความเร็วถูกควบคุมโดยการเปลี่ยนพารามิเตอร์ P1 ซึ่งกำหนดเฟสของสัญญาณขาเข้าซึ่งจะเปิดการเปลี่ยนแปลงของ triac
หลักการทำงานนั้นง่าย เมื่อเครื่องยนต์สตาร์ท เครื่องยนต์จะช้าลง ความเหนี่ยวนำจะเปลี่ยนลงและส่งผลให้ค่า U ในวงจร “R2->P1->C2” เพิ่มขึ้น เมื่อปล่อย C2 ออกมา ไตรแอคจะเปิดขึ้นเป็นระยะเวลาหนึ่ง
มีอีกโครงการหนึ่ง มันทำงานแตกต่างออกไปเล็กน้อย: โดยให้พลังงานชนิดย้อนกลับซึ่งเป็นประโยชน์สูงสุด วงจรประกอบด้วยไทริสเตอร์ที่ทรงพลังพอสมควร
จำนวนโครงการที่ 6 - การออกแบบตัวควบคุมไทริสเตอร์
วงจรประกอบด้วยเครื่องกำเนิดสัญญาณควบคุม แอมพลิฟายเออร์ ไทริสเตอร์ และส่วนวงจรที่ทำหน้าที่เป็นตัวป้องกันการหมุนของโรเตอร์
วงจรที่เป็นสากลที่สุดคือตัวควบคุมที่ใช้ triac และ dinistor (โครงการ 7) สามารถลดความเร็วการหมุนของเพลาได้อย่างราบรื่น ย้อนกลับมอเตอร์ (เปลี่ยนทิศทางการหมุน) และลดกระแสสตาร์ท
หลักการทำงานของวงจร:
- C1 จะถูกเรียกเก็บเงินจนกระทั่ง U พังทลายของไดนามิก D1 ถึง R2
- เมื่อ D1 พัง มันจะเปิดทางแยกของ triac D2 ซึ่งมีหน้าที่ควบคุมโหลด
แรงดันไฟฟ้าโหลดเป็นสัดส่วนโดยตรงกับส่วนประกอบความถี่เมื่อ D2 เปิดขึ้น ซึ่งขึ้นอยู่กับ R2 วงจรนี้ใช้กับเครื่องดูดฝุ่น ประกอบด้วยระบบควบคุมอิเล็กทรอนิกส์สากลรวมถึงความสามารถในการเชื่อมต่อไฟ 380 V ได้อย่างง่ายดาย ควรวางชิ้นส่วนทั้งหมดไว้บนแผงวงจรพิมพ์ที่ใช้เทคโนโลยีเหล็กเลเซอร์ (LUT) คุณสามารถหาข้อมูลเพิ่มเติมเกี่ยวกับเทคโนโลยีการผลิตบอร์ดนี้ได้บนอินเทอร์เน็ต
ดังนั้นเมื่อเลือกตัวควบคุมความเร็วของมอเตอร์ไฟฟ้าคุณสามารถซื้อโรงงานหรือสร้างเองได้ การสร้างตัวควบคุมแบบโฮมเมดนั้นค่อนข้างง่ายเนื่องจากหากคุณเข้าใจหลักการทำงานของอุปกรณ์คุณสามารถประกอบมันได้อย่างง่ายดาย นอกจากนี้คุณควรปฏิบัติตามกฎความปลอดภัยเมื่อติดตั้งชิ้นส่วนและเมื่อทำงานกับไฟฟ้า
เครื่องมือไฟฟ้าหรือเครื่องใช้ในครัวเรือนสมัยใหม่ใด ๆ ที่ใช้มอเตอร์สับเปลี่ยน นี่เป็นเพราะความสามารถรอบด้าน กล่าวคือ ความสามารถในการทำงานกับทั้งไฟฟ้ากระแสสลับและแรงดันไฟฟ้าตรง ข้อดีอีกประการหนึ่งคือแรงบิดสตาร์ทที่มีประสิทธิภาพ
อย่างไรก็ตาม ความเร็วสูงของมอเตอร์สับเปลี่ยนไม่ได้เหมาะกับผู้ใช้ทุกคน เพื่อการเริ่มต้นที่ราบรื่นและความสามารถในการเปลี่ยนความเร็วในการหมุนจึงมีการคิดค้นตัวควบคุมซึ่งค่อนข้างเป็นไปได้ที่จะทำด้วยมือของคุณเอง
หลักการทำงานและประเภทของมอเตอร์สับเปลี่ยน
มอเตอร์ไฟฟ้าแต่ละตัวประกอบด้วยตัวสับเปลี่ยน สเตเตอร์ โรเตอร์ และแปรง หลักการทำงานค่อนข้างง่าย:
นอกจากอุปกรณ์มาตรฐานแล้วยังมี:

อุปกรณ์ควบคุม
มีอุปกรณ์ดังกล่าวมากมายในโลก อย่างไรก็ตามสามารถแบ่งออกได้เป็น 2 กลุ่ม คือ สินค้ามาตรฐานและสินค้าดัดแปลง
อุปกรณ์มาตรฐาน
ผลิตภัณฑ์ทั่วไปมีความโดดเด่นด้วยความง่ายในการผลิต idynistor และความน่าเชื่อถือที่ดีเมื่อเปลี่ยนความเร็วของเครื่องยนต์ ตามกฎแล้วโมเดลดังกล่าวจะขึ้นอยู่กับตัวควบคุมไทริสเตอร์ หลักการทำงานของโครงร่างดังกล่าวค่อนข้างง่าย:

ดังนั้นความเร็วของมอเตอร์สับเปลี่ยนจึงถูกปรับ ในกรณีส่วนใหญ่จะใช้รูปแบบที่คล้ายกันในเครื่องดูดฝุ่นในครัวเรือนต่างประเทศ อย่างไรก็ตามคุณควรรู้ว่าตัวควบคุมความเร็วดังกล่าวไม่มีการตอบสนอง ดังนั้นเมื่อโหลดเปลี่ยนแปลงจึงต้องปรับความเร็วของมอเตอร์ไฟฟ้าด้วย
แผนการที่เปลี่ยนแปลง
 แน่นอนว่าอุปกรณ์มาตรฐานนี้เหมาะกับแฟน ๆ ของตัวควบคุมความเร็วหลาย ๆ คนในการ "เจาะ" เข้าไปในอุปกรณ์อิเล็กทรอนิกส์ อย่างไรก็ตาม หากไม่มีความก้าวหน้าและปรับปรุงผลิตภัณฑ์ เราก็จะยังคงอยู่ในยุคหิน ดังนั้นจึงมีการคิดค้นแผนการที่น่าสนใจมากขึ้นอย่างต่อเนื่องซึ่งผู้ผลิตหลายรายยินดีใช้
แน่นอนว่าอุปกรณ์มาตรฐานนี้เหมาะกับแฟน ๆ ของตัวควบคุมความเร็วหลาย ๆ คนในการ "เจาะ" เข้าไปในอุปกรณ์อิเล็กทรอนิกส์ อย่างไรก็ตาม หากไม่มีความก้าวหน้าและปรับปรุงผลิตภัณฑ์ เราก็จะยังคงอยู่ในยุคหิน ดังนั้นจึงมีการคิดค้นแผนการที่น่าสนใจมากขึ้นอย่างต่อเนื่องซึ่งผู้ผลิตหลายรายยินดีใช้
ที่ใช้กันมากที่สุดคือรีโอสแตทและตัวควบคุมแบบอินทิกรัล ตามชื่อที่แสดง ตัวเลือกแรกจะขึ้นอยู่กับวงจรลิโน่ ในกรณีที่สอง จะใช้ตัวจับเวลาอินทิกรัล
รีโอสแตติกมีประสิทธิภาพในการเปลี่ยนจำนวนรอบของมอเตอร์คอมมิวเตเตอร์ ประสิทธิภาพสูงเกิดจากทรานซิสเตอร์กำลังซึ่งเป็นส่วนหนึ่งของแรงดันไฟฟ้า ดังนั้นการไหลของกระแสจึงลดลงและมอเตอร์ทำงานโดยใช้แรงน้อยลง
วิดีโอ: อุปกรณ์ควบคุมความเร็วพร้อมการบำรุงรักษาพลังงาน
ข้อเสียเปรียบหลักของโครงการนี้คือความร้อนจำนวนมากที่เกิดขึ้น ดังนั้นเพื่อให้การทำงานราบรื่น ตัวควบคุมจะต้องได้รับความเย็นอย่างต่อเนื่อง นอกจากนี้การระบายความร้อนของอุปกรณ์ยังต้องเข้มข้นอีกด้วย
 มีการนำแนวทางที่แตกต่างออกไปในตัวควบคุมแบบรวม โดยที่ตัวจับเวลาแบบรวมจะรับผิดชอบโหลด ตามกฎแล้ววงจรดังกล่าวจะใช้ทรานซิสเตอร์เกือบทุกประเภท เนื่องจากประกอบด้วยวงจรไมโครที่มีค่ากระแสไฟขาออกสูง
มีการนำแนวทางที่แตกต่างออกไปในตัวควบคุมแบบรวม โดยที่ตัวจับเวลาแบบรวมจะรับผิดชอบโหลด ตามกฎแล้ววงจรดังกล่าวจะใช้ทรานซิสเตอร์เกือบทุกประเภท เนื่องจากประกอบด้วยวงจรไมโครที่มีค่ากระแสไฟขาออกสูง
หากโหลดน้อยกว่า 0.1 แอมแปร์ แรงดันไฟฟ้าทั้งหมดจะถูกส่งไปยังวงจรไมโครโดยตรง โดยข้ามทรานซิสเตอร์ อย่างไรก็ตาม เพื่อให้ตัวควบคุมทำงานได้อย่างมีประสิทธิภาพ จำเป็นต้องมีแรงดันไฟฟ้า 12V ที่เกต ดังนั้นวงจรไฟฟ้าและแรงดันไฟฟ้าจะต้องสอดคล้องกับช่วงนี้
ภาพรวมของวงจรทั่วไป
 คุณสามารถควบคุมการหมุนของเพลาของมอเตอร์ไฟฟ้ากำลังต่ำได้โดยการเชื่อมต่อตัวต้านทานกำลังแบบอนุกรมโดยไม่มีหมายเลข อย่างไรก็ตาม ตัวเลือกนี้มีประสิทธิภาพต่ำมากและไม่สามารถเปลี่ยนความเร็วได้อย่างราบรื่น เพื่อหลีกเลี่ยงปัญหาดังกล่าว คุณควรพิจารณาวงจรควบคุมหลายวงจรที่ใช้บ่อยที่สุด
คุณสามารถควบคุมการหมุนของเพลาของมอเตอร์ไฟฟ้ากำลังต่ำได้โดยการเชื่อมต่อตัวต้านทานกำลังแบบอนุกรมโดยไม่มีหมายเลข อย่างไรก็ตาม ตัวเลือกนี้มีประสิทธิภาพต่ำมากและไม่สามารถเปลี่ยนความเร็วได้อย่างราบรื่น เพื่อหลีกเลี่ยงปัญหาดังกล่าว คุณควรพิจารณาวงจรควบคุมหลายวงจรที่ใช้บ่อยที่สุด
ดังที่คุณทราบ PWM มีแอมพลิจูดพัลส์คงที่ นอกจากนี้แอมพลิจูดยังเหมือนกับแรงดันไฟฟ้า ส่งผลให้มอเตอร์ไฟฟ้าไม่หยุดทำงานแม้ทำงานด้วยความเร็วต่ำก็ตาม
ตัวเลือกที่สองคล้ายกับตัวเลือกแรก ข้อแตกต่างเพียงอย่างเดียวคือมีการใช้แอมพลิฟายเออร์ในการดำเนินงานเป็นออสซิลเลเตอร์หลัก ส่วนประกอบนี้มีความถี่ 500 เฮิรตซ์ และผลิตพัลส์รูปสามเหลี่ยม การปรับทำได้โดยใช้ตัวต้านทานแบบปรับค่าได้
วิธีทำด้วยตัวเอง
 หากคุณไม่ต้องการเสียเงินซื้ออุปกรณ์สำเร็จรูปคุณสามารถทำเองได้ ด้วยวิธีนี้ คุณไม่เพียงสามารถประหยัดเงิน แต่ยังได้รับประสบการณ์ที่เป็นประโยชน์อีกด้วย ดังนั้นในการสร้างตัวควบคุมไทริสเตอร์คุณจะต้อง:
หากคุณไม่ต้องการเสียเงินซื้ออุปกรณ์สำเร็จรูปคุณสามารถทำเองได้ ด้วยวิธีนี้ คุณไม่เพียงสามารถประหยัดเงิน แต่ยังได้รับประสบการณ์ที่เป็นประโยชน์อีกด้วย ดังนั้นในการสร้างตัวควบคุมไทริสเตอร์คุณจะต้อง:
- หัวแร้ง (เพื่อตรวจสอบการทำงาน);
- สายไฟ;
- ไทริสเตอร์ ตัวเก็บประจุ และตัวต้านทาน
- โครงการ
ดังที่เห็นได้จากแผนภาพ ตัวควบคุมจะควบคุมเพียงครึ่งรอบ 1 รอบเท่านั้น อย่างไรก็ตาม สำหรับการทดสอบประสิทธิภาพกับหัวแร้งทั่วไปก็เพียงพอแล้ว
หากคุณไม่มีความรู้เพียงพอที่จะถอดรหัสไดอะแกรม คุณสามารถทำความคุ้นเคยกับเวอร์ชันข้อความได้:

การใช้หน่วยงานกำกับดูแลช่วยให้สามารถใช้มอเตอร์ไฟฟ้าได้อย่างประหยัดมากขึ้น ในบางสถานการณ์ อุปกรณ์ดังกล่าวสามารถสร้างขึ้นได้อย่างอิสระ อย่างไรก็ตามเพื่อวัตถุประสงค์ที่จริงจังยิ่งขึ้น (เช่นการตรวจสอบอุปกรณ์ทำความร้อน) ควรซื้อรุ่นสำเร็จรูปจะดีกว่า โชคดีที่มีผลิตภัณฑ์ดังกล่าวให้เลือกมากมายในท้องตลาดและราคาก็ค่อนข้างแพง
คุณมีเครื่องเจียร แต่ไม่มีตัวควบคุมความเร็วหรือไม่? คุณสามารถทำเองได้
ตัวควบคุมความเร็วและสตาร์ทแบบนุ่มนวลสำหรับเครื่องบด
ทั้งสองอย่างจำเป็นสำหรับการทำงานของเครื่องมือไฟฟ้าที่เชื่อถือได้และสะดวกสบาย
ตัวควบคุมความเร็วคืออะไรและมีไว้เพื่ออะไร?
อุปกรณ์นี้ออกแบบมาเพื่อควบคุมกำลังของมอเตอร์ไฟฟ้า ด้วยความช่วยเหลือนี้ คุณสามารถควบคุมความเร็วการหมุนของเพลาได้ ตัวเลขบนวงล้อปรับบ่งบอกถึงการเปลี่ยนแปลงความเร็วในการหมุนของดิสก์
ไม่ได้ติดตั้งตัวควบคุมไว้บนเครื่องเจียรไฟฟ้าทั้งหมด
เครื่องบดพร้อมตัวควบคุมความเร็ว: ตัวอย่างในรูปภาพ









การขาดตัวควบคุมทำให้จำกัดการใช้เครื่องบดอย่างมาก ความเร็วในการหมุนของดิสก์ส่งผลต่อคุณภาพของเครื่องบดและขึ้นอยู่กับความหนาและความแข็งของวัสดุที่กำลังดำเนินการ
หากไม่ได้ควบคุมความเร็ว ความเร็วจะถูกรักษาไว้ที่ระดับสูงสุดอย่างต่อเนื่อง โหมดนี้เหมาะสำหรับวัสดุที่แข็งและหนาเท่านั้น เช่น มุม ท่อ หรือโปรไฟล์ เหตุผลที่จำเป็นต้องมีหน่วยงานกำกับดูแล:
- โลหะบางหรือไม้เนื้ออ่อนต้องใช้ความเร็วการหมุนต่ำกว่า มิฉะนั้นขอบของโลหะจะละลายพื้นผิวการทำงานของดิสก์จะถูกชะล้างและไม้จะเปลี่ยนเป็นสีดำจากอุณหภูมิสูง
- ในการตัดแร่ธาตุจำเป็นต้องควบคุมความเร็ว ส่วนใหญ่หักเป็นชิ้นเล็กๆ ด้วยความเร็วสูง และพื้นที่การตัดไม่เท่ากัน
- ในการขัดเงารถยนต์คุณไม่จำเป็นต้องใช้ความเร็วสูงสุด ไม่เช่นนั้นงานสีจะเสื่อมสภาพ
- หากต้องการเปลี่ยนดิสก์จากเส้นผ่านศูนย์กลางเล็กลงให้ใหญ่ขึ้น คุณต้องลดความเร็วลง แทบจะเป็นไปไม่ได้เลยที่จะถือเครื่องบดด้วยมือโดยมีดิสก์ขนาดใหญ่หมุนด้วยความเร็วสูง
- ไม่ควรให้ใบเพชรร้อนเกินไปเพื่อไม่ให้พื้นผิวเสียหาย เมื่อต้องการทำเช่นนี้ ความเร็วจะลดลง
ทำไมคุณถึงต้องเริ่มต้นอย่างนุ่มนวล?
การปรากฏตัวของการเปิดตัวดังกล่าวเป็นจุดสำคัญมาก เมื่อสตาร์ทเครื่องมือไฟฟ้าอันทรงพลังที่เชื่อมต่อกับเครือข่าย จะเกิดกระแสไฟกระชากพุ่งขึ้น ซึ่งสูงกว่ากระแสไฟที่กำหนดของมอเตอร์หลายเท่า และแรงดันไฟฟ้าในเครือข่ายจะลดลง แม้ว่าไฟกระชากนี้จะมีอายุการใช้งานสั้น แต่ก็ทำให้แปรง มอเตอร์สับเปลี่ยน และส่วนประกอบเครื่องมือทั้งหมดที่ไหลผ่านนั้นเพิ่มขึ้น สิ่งนี้อาจทำให้เครื่องมือทำงานล้มเหลวโดยเฉพาะเครื่องมือของจีนโดยมีขดลวดที่ไม่น่าเชื่อถือซึ่งอาจไหม้ได้ในระหว่างการเปิดเครื่องในช่วงเวลาที่ไม่เหมาะสมที่สุด นอกจากนี้ยังมีการกระตุกเชิงกลขนาดใหญ่ในระหว่างการสตาร์ทซึ่งทำให้กระปุกเกียร์สึกหรออย่างรวดเร็ว การเริ่มต้นดังกล่าวช่วยยืดอายุการใช้งานของเครื่องมือไฟฟ้าและเพิ่มระดับความสะดวกสบายระหว่างการใช้งาน
หน่วยอิเล็กทรอนิกส์ในเครื่องบดมุม
หน่วยอิเล็กทรอนิกส์ช่วยให้คุณสามารถรวมตัวควบคุมความเร็วและการสตาร์ทแบบนุ่มนวลเข้าด้วยกันได้ วงจรอิเล็กทรอนิกส์ถูกนำมาใช้บนหลักการของการควบคุมเฟสพัลส์โดยเพิ่มขึ้นทีละน้อยในเฟสการเปิดของไตรแอค เครื่องบดที่มีกำลังและราคาต่างกันสามารถติดตั้งบล็อกดังกล่าวได้
ประเภทของอุปกรณ์ที่มีหน่วยอิเล็กทรอนิกส์: ตัวอย่างในตาราง
เครื่องบดมุมพร้อมหน่วยอิเล็กทรอนิกส์: ยอดนิยมในรูปภาพ





ตัวควบคุมความเร็ว DIY
ตัวควบคุมความเร็วไม่ได้ติดตั้งอยู่ในเครื่องเจียรไฟฟ้าทุกรุ่น คุณสามารถสร้างบล็อกเพื่อควบคุมความเร็วด้วยมือของคุณเองหรือซื้อแบบสำเร็จรูป
ตัวควบคุมความเร็วจากโรงงานสำหรับเครื่องเจียรมุม: ตัวอย่างภาพถ่าย

 ตัวควบคุมความเร็วเครื่องบดมุม Bosh
ตัวควบคุมความเร็วเครื่องบดมุม Bosh  เครื่องปรับความเร็วสำหรับเครื่องเจียรไฟฟ้า Sturm
เครื่องปรับความเร็วสำหรับเครื่องเจียรไฟฟ้า Sturm 
 ตัวควบคุมความเร็วสำหรับเครื่องเจียรไฟฟ้า DWT
ตัวควบคุมความเร็วสำหรับเครื่องเจียรไฟฟ้า DWT
หน่วยงานกำกับดูแลดังกล่าวมีวงจรอิเล็กทรอนิกส์อย่างง่าย ดังนั้นการสร้างอะนาล็อกด้วยมือของคุณเองจึงไม่ใช่เรื่องยาก มาดูกันว่าตัวควบคุมความเร็วสำหรับเครื่องบดที่มีขนาดไม่เกิน 3 kW ประกอบมาจากอะไร
การผลิต PCB
แผนภาพที่ง่ายที่สุดแสดงไว้ด้านล่าง
เนื่องจากวงจรนั้นง่ายมาก จึงไม่มีประโยชน์ในการติดตั้งโปรแกรมคอมพิวเตอร์เพื่อประมวลผลวงจรไฟฟ้าเพียงเพราะเหตุนี้ นอกจากนี้ยังจำเป็นต้องใช้กระดาษพิเศษในการพิมพ์ และไม่ใช่ทุกคนที่มีเครื่องพิมพ์เลเซอร์ ดังนั้นเราจึงใช้เส้นทางที่ง่ายที่สุดในการผลิตแผงวงจรพิมพ์
นำชิ้นส่วนของ PCB ตัดให้ได้ขนาดที่จำเป็นสำหรับชิป ทรายพื้นผิวและขจัดคราบไขมัน ใช้เลเซอร์ดิสก์มาร์กเกอร์แล้ววาดไดอะแกรมบน PCB เพื่อหลีกเลี่ยงข้อผิดพลาด ให้วาดด้วยดินสอก่อน ต่อไปเราเริ่มแกะสลัก คุณสามารถซื้อเฟอร์ริกคลอไรด์ได้ แต่อ่างล้างจานหลังจากนั้นจะทำความสะอาดได้ยาก หากทำตกบนเสื้อผ้าโดยไม่ได้ตั้งใจ จะทิ้งคราบที่ไม่สามารถขจัดออกได้หมด ดังนั้นเราจะใช้วิธีที่ปลอดภัยและถูก เตรียมภาชนะพลาสติกสำหรับใส่สารละลาย เทไฮโดรเจนเปอร์ออกไซด์ 100 มล. เติมเกลือครึ่งช้อนโต๊ะและกรดซิตริกหนึ่งซองมากถึง 50 กรัม สารละลายทำโดยไม่มีน้ำ คุณสามารถทดลองกับสัดส่วนได้ และหาวิธีแก้ปัญหาที่สดใหม่อยู่เสมอ ควรถอดทองแดงทั้งหมดออก ใช้เวลาประมาณหนึ่งชั่วโมง ล้างกระดานใต้น้ำไหล เจาะรู
มันสามารถทำให้ง่ายยิ่งขึ้นไปอีก วาดแผนภาพบนกระดาษ ติดด้วยเทปเข้ากับ PCB ที่ตัดออกและเจาะรู และหลังจากนั้นให้วาดวงจรด้วยปากกามาร์กเกอร์บนกระดานแล้วกัดมัน
เช็ดกระดานด้วยแอลกอฮอล์-ขัดสนหรือสารละลายขัดสนในไอโซโพรพิลแอลกอฮอล์เป็นประจำ บัดกรีและดีบุกรางรถไฟ
การติดตั้งชิ้นส่วนอิเล็กทรอนิกส์ (พร้อมรูปถ่าย)
เตรียมทุกสิ่งที่คุณต้องการเพื่อยึดบอร์ด:
- หลอดบัดกรี
- หมุดไปที่กระดาน
- ไทรแอก บีทีเอ16
- ตัวเก็บประจุ 100nF
- ตัวต้านทานคงที่ 2 kOhm
- ไดนิสเตอร์ db3.
- ตัวต้านทานแบบแปรผันที่มีการพึ่งพาเชิงเส้นที่ 500 kOhm
ตัดหมุดสี่ตัวออกแล้วบัดกรีเข้ากับกระดาน จากนั้นติดตั้งไดนิสเตอร์และชิ้นส่วนอื่นๆ ทั้งหมด ยกเว้นตัวต้านทานแบบปรับค่าได้ ประสาน triac ครั้งสุดท้าย ใช้เข็มและแปรง ทำความสะอาดช่องว่างระหว่างรางเพื่อถอดกางเกงขาสั้นที่เป็นไปได้ออก ไทรแอกที่มีปลายอิสระและมีรูติดอยู่กับหม้อน้ำอลูมิเนียมเพื่อระบายความร้อน ใช้กระดาษทรายละเอียดทำความสะอาดบริเวณที่ติดองค์ประกอบ นำพาความร้อนยี่ห้อ KPT-8 มาทาที่หม้อน้ำเล็กน้อย ยึดไทรแอกด้วยสกรูและน็อต เนื่องจากทุกส่วนของการออกแบบของเราอยู่ภายใต้แรงดันไฟฟ้าหลัก เราจะใช้ที่จับที่ทำจากวัสดุฉนวนสำหรับการปรับเปลี่ยน วางไว้บนตัวต้านทานแบบปรับค่าได้ ใช้ลวดเส้นหนึ่งเชื่อมต่อขั้วต่อด้านนอกและตรงกลางของตัวต้านทาน ตอนนี้ประสานสายไฟสองเส้นเข้ากับขั้วต่อด้านนอก บัดกรีปลายด้านตรงข้ามของสายไฟเข้ากับพินที่เกี่ยวข้องบนบอร์ด
คุณสามารถทำการติดตั้งทั้งหมดแบบบานพับได้ ในการทำเช่นนี้เราประสานชิ้นส่วนของไมโครเซอร์กิตเข้าด้วยกันโดยตรงโดยใช้ขาขององค์ประกอบและสายไฟ ที่นี่คุณต้องมีหม้อน้ำสำหรับ triac ด้วย สามารถทำจากอลูมิเนียมชิ้นเล็กๆได้ ตัวควบคุมดังกล่าวจะใช้พื้นที่น้อยมากและสามารถวางไว้ในตัวเครื่องบดมุมได้
หากคุณต้องการติดตั้งไฟ LED ในตัวควบคุมความเร็ว ให้ใช้วงจรอื่น
วงจรควบคุมพร้อมไฟ LED
เพิ่มไดโอดที่นี่:
- VD 1 - ไดโอด 1N4148;
- VD 2 - LED (แสดงการทำงาน)
ประกอบตัวควบคุมด้วย LED
เครื่องนี้ออกแบบมาสำหรับเครื่องเจียรไฟฟ้ากำลังต่ำ ดังนั้นจึงไม่ได้ติดตั้ง Triac บนหม้อน้ำ แต่ถ้าคุณใช้ในเครื่องมืออันทรงพลังอย่าลืมเกี่ยวกับบอร์ดอลูมิเนียมสำหรับกระจายความร้อนและ bta16 triac
การสร้างตัวควบคุมกำลัง: วิดีโอ
การทดสอบหน่วยอิเล็กทรอนิกส์
ก่อนเชื่อมต่อตัวเครื่องเข้ากับตัวเครื่องเรามาทดสอบกันก่อน ใช้ซ็อกเก็ตเหนือศีรษะ ติดตั้งสายไฟสองเส้นเข้าไป เชื่อมต่อหนึ่งในนั้นเข้ากับบอร์ดและอันที่สองเข้ากับสายเคเบิลเครือข่าย สายเหลืออีกเส้นหนึ่ง เชื่อมต่อกับการ์ดเครือข่าย ปรากฎว่าตัวควบคุมเชื่อมต่อแบบอนุกรมกับวงจรโหลดกำลัง เชื่อมต่อหลอดไฟเข้ากับวงจรและตรวจสอบการทำงานของอุปกรณ์
การทดสอบตัวควบคุมกำลังไฟด้วยเครื่องทดสอบและหลอดไฟ (วิดีโอ)
การเชื่อมต่อตัวควบคุมเข้ากับเครื่องบด
ตัวควบคุมความเร็วเชื่อมต่อกับเครื่องมือเป็นอนุกรม
แผนภาพการเชื่อมต่อแสดงไว้ด้านล่าง
หากมีพื้นที่ว่างในมือของเครื่องบดก็สามารถวางบล็อกของเราไว้ที่นั่นได้ วงจรที่ติดตั้งบนพื้นผิวติดกาวด้วยอีพอกซีเรซินซึ่งทำหน้าที่เป็นฉนวนและป้องกันการสั่นไหว นำตัวต้านทานปรับค่าได้พร้อมที่จับพลาสติกออกมาเพื่อควบคุมความเร็ว
การติดตั้งตัวควบคุมภายในตัวเครื่องบดมุม: วิดีโอ
หน่วยอิเล็กทรอนิกส์ที่ประกอบแยกจากเครื่องเจียรไฟฟ้าจะอยู่ในตัวเครื่องที่ทำจากวัสดุฉนวน เนื่องจากส่วนประกอบทั้งหมดอยู่ภายใต้แรงดันไฟฟ้าหลัก ซ็อกเก็ตแบบพกพาที่มีสายเคเบิลเครือข่ายถูกขันเข้ากับเคส ที่จับของตัวต้านทานปรับค่าได้จะแสดงอยู่ด้านนอก
ตัวควบคุมเสียบเข้ากับเครือข่าย และเสียบอุปกรณ์เข้ากับเต้ารับแบบพกพา
ตัวควบคุมความเร็วสำหรับเครื่องบดมุมในตัวเครื่องแยกต่างหาก: วิดีโอ
การใช้งาน
มีคำแนะนำหลายประการสำหรับการใช้เครื่องเจียรไฟฟ้ากับหน่วยอิเล็กทรอนิกส์อย่างถูกต้อง เมื่อสตาร์ทเครื่องให้เร่งความเร็วตามความเร็วที่ตั้งไว้ไม่ต้องรีบตัดอะไร หลังจากปิดเครื่องแล้ว ให้รีสตาร์ทอีกครั้งหลังจากนั้นไม่กี่วินาทีเพื่อให้ตัวเก็บประจุในวงจรมีเวลาคายประจุ จากนั้นการรีสตาร์ทจะราบรื่น คุณสามารถปรับความเร็วในขณะที่เครื่องบดทำงานโดยหมุนปุ่มตัวต้านทานแบบปรับค่าช้าๆ
ข้อดีของเครื่องบดที่ไม่มีตัวควบคุมความเร็วคือคุณสามารถสร้างตัวควบคุมความเร็วสากลสำหรับเครื่องมือไฟฟ้าด้วยตัวเองได้โดยไม่มีค่าใช้จ่ายร้ายแรง หน่วยอิเล็กทรอนิกส์ที่ติดตั้งอยู่ในกล่องแยกต่างหาก และไม่ได้อยู่ในตัวเครื่องเจียร สามารถใช้กับสว่าน สว่าน หรือเลื่อยวงเดือนได้ สำหรับเครื่องมือใดๆ ที่มีมอเตอร์สับเปลี่ยน แน่นอนว่าจะสะดวกกว่าเมื่อปุ่มควบคุมอยู่บนเครื่องดนตรี และคุณไม่จำเป็นต้องไปไหนหรือก้มตัวเพื่อหมุน แต่นี่ขึ้นอยู่กับคุณที่จะตัดสินใจ มันเป็นเรื่องของรสนิยม
จำเป็นต้องมีตัวควบคุมความเร็วรอบเครื่องยนต์เพื่อให้สามารถเร่งความเร็วและเบรกได้อย่างราบรื่น อุปกรณ์ดังกล่าวแพร่หลายในอุตสาหกรรมสมัยใหม่ ด้วยเหตุนี้จึงสามารถวัดความเร็วของการเคลื่อนที่ในสายพานลำเลียงบนอุปกรณ์ต่าง ๆ รวมถึงเวลาที่พัดลมหมุนได้ มอเตอร์ที่มีกำลังไฟ 12 โวลต์ใช้ในระบบควบคุมทั้งหมดและในรถยนต์
การออกแบบระบบ
ประเภทมอเตอร์สับเปลี่ยนส่วนใหญ่ประกอบด้วยโรเตอร์ สเตเตอร์ รวมถึงแปรง และเครื่องกำเนิดไฟฟ้าแบบเร็ว
- โรเตอร์เป็นส่วนหนึ่งของการหมุน สเตเตอร์เป็นแม่เหล็กชนิดภายนอก
- แปรงซึ่งทำจากกราไฟต์เป็นส่วนหลักของหน้าสัมผัสแบบเลื่อน ซึ่งใช้แรงดันไฟฟ้ากับกระดองหมุน
- เครื่องกำเนิดไฟฟ้ากระแสสลับเป็นอุปกรณ์ที่ตรวจสอบลักษณะการหมุนของอุปกรณ์ หากมีการละเมิดความสม่ำเสมอของกระบวนการหมุนก็จะปรับระดับแรงดันไฟฟ้าที่เข้าสู่เครื่องยนต์ทำให้นุ่มนวลขึ้นและช้าลง
- สเตเตอร์ ชิ้นส่วนดังกล่าวอาจไม่รวมแม่เหล็กหนึ่งอัน แต่เช่นเสาสองคู่ ในเวลาเดียวกันแทนที่จะเป็นแม่เหล็กคงที่จะมีขดลวดแม่เหล็กไฟฟ้าแทน อุปกรณ์ดังกล่าวสามารถทำงานได้ทั้งจากกระแสตรงและกระแสสลับ
แผนผังตัวควบคุมความเร็วของมอเตอร์สับเปลี่ยน
 ตัวแปลงความถี่พิเศษใช้ในรูปแบบของตัวควบคุมความเร็วสำหรับมอเตอร์ไฟฟ้า 220 V และ 380 V . อุปกรณ์ดังกล่าวจัดอยู่ในประเภทเทคโนโลยีขั้นสูงช่วยในการเปลี่ยนแปลงพื้นฐานของคุณลักษณะปัจจุบัน (รูปร่างของสัญญาณตลอดจนความถี่) มีการติดตั้งทรานซิสเตอร์เซมิคอนดักเตอร์อันทรงพลังรวมถึงโมดูเลเตอร์ความกว้างพัลส์ กระบวนการใช้งานอุปกรณ์ทั้งหมดเกิดขึ้นผ่านการควบคุมหน่วยพิเศษบนไมโครคอนโทรลเลอร์ การเปลี่ยนแปลงความเร็วในการหมุนของโรเตอร์ของมอเตอร์เกิดขึ้นค่อนข้างช้า
ตัวแปลงความถี่พิเศษใช้ในรูปแบบของตัวควบคุมความเร็วสำหรับมอเตอร์ไฟฟ้า 220 V และ 380 V . อุปกรณ์ดังกล่าวจัดอยู่ในประเภทเทคโนโลยีขั้นสูงช่วยในการเปลี่ยนแปลงพื้นฐานของคุณลักษณะปัจจุบัน (รูปร่างของสัญญาณตลอดจนความถี่) มีการติดตั้งทรานซิสเตอร์เซมิคอนดักเตอร์อันทรงพลังรวมถึงโมดูเลเตอร์ความกว้างพัลส์ กระบวนการใช้งานอุปกรณ์ทั้งหมดเกิดขึ้นผ่านการควบคุมหน่วยพิเศษบนไมโครคอนโทรลเลอร์ การเปลี่ยนแปลงความเร็วในการหมุนของโรเตอร์ของมอเตอร์เกิดขึ้นค่อนข้างช้า
ด้วยเหตุนี้จึงมีการใช้ตัวแปลงความถี่ในอุปกรณ์ที่โหลด ยิ่งกระบวนการเร่งความเร็วเกิดขึ้นช้าลง โหลดบนกระปุกเกียร์และสายพานลำเลียงก็จะน้อยลงไปด้วย ในเครื่องกำเนิดความถี่ทั้งหมด คุณจะพบระดับการป้องกันได้หลายระดับ: ตามโหลด กระแสไฟฟ้า แรงดันไฟฟ้า และตัวบ่งชี้อื่นๆ
ตัวแปลงความถี่บางรุ่นจ่ายพลังงานจากแรงดันไฟฟ้าเฟสเดียว (จะถึง 220 โวลต์) และสร้างแรงดันไฟฟ้าสามเฟสจากนั้น ซึ่งช่วยในการเชื่อมต่อมอเตอร์อะซิงโครนัสที่บ้านโดยไม่ต้องใช้วงจรและการออกแบบที่ซับซ้อนเป็นพิเศษ ในกรณีนี้ผู้บริโภคจะไม่สูญเสียพลังงานขณะทำงานกับอุปกรณ์ดังกล่าว
เหตุใดจึงต้องใช้อุปกรณ์ควบคุมดังกล่าว
ถ้าเราพูดถึงมอเตอร์ควบคุมดังนั้นการปฏิวัติที่จำเป็นคือ:

วงจรที่ใช้สร้างตัวแปลงความถี่ในมอเตอร์ไฟฟ้ามีการใช้กันอย่างแพร่หลายในอุปกรณ์ในครัวเรือนส่วนใหญ่ ระบบดังกล่าวสามารถพบได้ในอุปกรณ์จ่ายไฟแบบไร้สาย, เครื่องเชื่อม, ที่ชาร์จโทรศัพท์, อุปกรณ์จ่ายไฟสำหรับคอมพิวเตอร์ส่วนบุคคลและแล็ปท็อป, ตัวปรับแรงดันไฟฟ้า, ชุดจุดระเบิดของหลอดไฟสำหรับแบ็คไลท์จอภาพสมัยใหม่รวมถึงทีวี LCD
ตัวควบคุมความเร็วมอเตอร์ไฟฟ้า 220V
คุณสามารถทำมันเองได้อย่างสมบูรณ์แต่สำหรับสิ่งนี้คุณจะต้องศึกษาคุณสมบัติทางเทคนิคที่เป็นไปได้ทั้งหมดของอุปกรณ์ จากการออกแบบสามารถแยกแยะชิ้นส่วนหลักได้หลายประเภท กล่าวคือ:
- มอเตอร์ไฟฟ้านั้นเอง
- ระบบควบคุมไมโครคอนโทรลเลอร์สำหรับหน่วยแปลง
- ไดรฟ์และชิ้นส่วนกลไกที่เกี่ยวข้องกับการทำงานของระบบ
 ก่อนที่จะสตาร์ทอุปกรณ์ หลังจากจ่ายแรงดันไฟฟ้าให้กับขดลวดแล้ว กระบวนการหมุนเครื่องยนต์จะเริ่มต้นด้วยกำลังสูงสุด เป็นคุณลักษณะนี้ที่จะแยกแยะอุปกรณ์อะซิงโครนัสจากประเภทอื่น เหนือสิ่งอื่นใดคือการเพิ่มภาระจากกลไกที่ทำให้อุปกรณ์เคลื่อนที่ ท้ายที่สุดแล้ว ในระยะเริ่มแรกของการทำงานของอุปกรณ์ พลังงานตลอดจนปริมาณการใช้กระแสไฟจะเพิ่มขึ้นถึงระดับสูงสุดเท่านั้น
ก่อนที่จะสตาร์ทอุปกรณ์ หลังจากจ่ายแรงดันไฟฟ้าให้กับขดลวดแล้ว กระบวนการหมุนเครื่องยนต์จะเริ่มต้นด้วยกำลังสูงสุด เป็นคุณลักษณะนี้ที่จะแยกแยะอุปกรณ์อะซิงโครนัสจากประเภทอื่น เหนือสิ่งอื่นใดคือการเพิ่มภาระจากกลไกที่ทำให้อุปกรณ์เคลื่อนที่ ท้ายที่สุดแล้ว ในระยะเริ่มแรกของการทำงานของอุปกรณ์ พลังงานตลอดจนปริมาณการใช้กระแสไฟจะเพิ่มขึ้นถึงระดับสูงสุดเท่านั้น
ในเวลานี้กระบวนการปล่อยความร้อนออกมามากที่สุด ความร้อนสูงเกินไปเกิดขึ้นในขดลวดเช่นเดียวกับในสายไฟ การใช้การแปลงบางส่วนจะช่วยป้องกันไม่ให้สิ่งนี้เกิดขึ้น หากคุณติดตั้งซอฟต์สตาร์ทจากนั้นถึงเครื่องหมายความเร็วสูงสุด (ซึ่งสามารถปรับได้ด้วยอุปกรณ์และอาจไม่ใช่ 1,500 รอบต่อนาที แต่เพียง 1,000) เครื่องยนต์จะเริ่มเร่งความเร็วไม่ใช่ในช่วงแรกของการทำงาน แต่ในช่วง 10 วินาทีถัดไป (ในเวลาเดียวกันทุก ๆ วินาทีอุปกรณ์จะเพิ่มการปฏิวัติ 100-150 รอบ) ในเวลานี้ภาระของกลไกและสายไฟทั้งหมดเริ่มลดลงหลายครั้ง
วิธีทำตัวควบคุมด้วยมือของคุณเอง
คุณสามารถสร้างตัวควบคุมความเร็วมอเตอร์ไฟฟ้าประมาณ 12 V ได้อย่างอิสระโดยสมบูรณ์ คุณควรใช้สิ่งนี้ สลับหลายตำแหน่งพร้อมกันรวมถึงตัวต้านทานแบบลวดพันพิเศษ ด้วยความช่วยเหลือของอย่างหลังระดับแรงดันไฟฟ้าของแหล่งจ่ายจะเปลี่ยนไป (และในเวลาเดียวกันตัวบ่งชี้ความเร็วในการหมุน) สามารถใช้ระบบเดียวกันนี้ในการเคลื่อนที่แบบอะซิงโครนัสได้ แต่จะมีประสิทธิภาพน้อยลง
เมื่อหลายปีก่อนตัวควบคุมเชิงกลถูกนำมาใช้กันอย่างแพร่หลาย - พวกมันถูกสร้างขึ้นบนพื้นฐานของระบบขับเคลื่อนเกียร์หรือตัวแปรผัน แต่อุปกรณ์ดังกล่าวถือว่าไม่น่าเชื่อถือมากนัก อุปกรณ์อิเล็กทรอนิกส์แสดงตัวเองดีขึ้นหลายเท่าเนื่องจากมีขนาดไม่ใหญ่นักและอนุญาตให้ปรับไดรฟ์ได้ละเอียดยิ่งขึ้น
ในการสร้างตัวควบคุมการหมุนของมอเตอร์ไฟฟ้าควรใช้อุปกรณ์หลายเครื่องในคราวเดียวซึ่งสามารถซื้อได้ที่ร้านฮาร์ดแวร์หรือนำออกจากอุปกรณ์สินค้าคงคลังเก่า เพื่อให้กระบวนการปรับเสร็จสมบูรณ์ คุณควรเปิดเครื่อง วงจรตัวต้านทานปรับค่าพิเศษ. ด้วยความช่วยเหลือกระบวนการเปลี่ยนความกว้างของสัญญาณที่เข้าสู่ตัวต้านทานจึงเกิดขึ้น
การนำระบบการจัดการไปใช้
 เพื่อปรับปรุงประสิทธิภาพของอุปกรณ์ที่ง่ายที่สุดอย่างมีนัยสำคัญ มันคุ้มค่าที่จะเชื่อมต่อการควบคุมไมโครคอนโทรลเลอร์เข้ากับวงจรควบคุมความเร็วรอบเครื่องยนต์ ในการดำเนินการนี้ คุณควรเลือกโปรเซสเซอร์ที่มีจำนวนอินพุตและเอาต์พุตที่เหมาะสมตามลำดับ: เพื่อเชื่อมต่อเซ็นเซอร์ ปุ่ม และปุ่มอิเล็กทรอนิกส์พิเศษ
เพื่อปรับปรุงประสิทธิภาพของอุปกรณ์ที่ง่ายที่สุดอย่างมีนัยสำคัญ มันคุ้มค่าที่จะเชื่อมต่อการควบคุมไมโครคอนโทรลเลอร์เข้ากับวงจรควบคุมความเร็วรอบเครื่องยนต์ ในการดำเนินการนี้ คุณควรเลือกโปรเซสเซอร์ที่มีจำนวนอินพุตและเอาต์พุตที่เหมาะสมตามลำดับ: เพื่อเชื่อมต่อเซ็นเซอร์ ปุ่ม และปุ่มอิเล็กทรอนิกส์พิเศษ
คุณควรใช้เพื่อทำการทดลอง ไมโครคอนโทรลเลอร์พิเศษ AtMega 128เป็นคอนโทรลเลอร์ที่ใช้งานง่ายและใช้กันอย่างแพร่หลาย ในการใช้งานฟรีคุณจะพบรูปแบบการใช้งานจำนวนมาก เพื่อให้อุปกรณ์ดำเนินการได้อย่างถูกต้องควรเขียนอัลกอริธึมของการกระทำบางอย่างลงไป - การตอบสนองต่อการเคลื่อนไหวบางอย่าง ตัวอย่างเช่น เมื่ออุณหภูมิสูงถึง 60 องศาเซลเซียส (การวัดจะระบุไว้บนกราฟของอุปกรณ์เอง) อุปกรณ์ควรปิดโดยอัตโนมัติ
การปรับการทำงาน
ตอนนี้ควรพูดถึงวิธีปรับความเร็วในมอเตอร์แบบแปรงถ่าน เนื่องจากความเร็วโดยรวมของการหมุนของมอเตอร์สามารถขึ้นอยู่กับขนาดของระดับแรงดันไฟฟ้าที่ให้มาได้โดยตรงระบบควบคุมใด ๆ ที่สามารถทำหน้าที่ดังกล่าวจึงค่อนข้างเหมาะสมสำหรับสิ่งนี้
มันคุ้มค่าที่จะแสดงรายการอุปกรณ์หลายประเภท:
- เครื่องเปลี่ยนรูปอัตโนมัติในห้องปฏิบัติการ (LATR)
- แผงควบคุมโรงงานที่ใช้ในอุปกรณ์ในครัวเรือน (คุณสามารถใช้แผงควบคุมที่ใช้ในเครื่องดูดฝุ่นและเครื่องผสมได้)
- ปุ่มที่ใช้ในการออกแบบเครื่องมือไฟฟ้า
- หน่วยงานกำกับดูแลประเภทครัวเรือนที่มีการติดตั้งการทำงานที่ราบรื่นเป็นพิเศษ
 แต่ในขณะเดียวกัน วิธีการดังกล่าวทั้งหมดก็มีข้อบกพร่องบางประการ ประกอบกับกระบวนการลดความเร็วทำให้กำลังโดยรวมของเครื่องยนต์ลดลงด้วย บางครั้งก็สามารถหยุดได้เพียงแค่ใช้มือสัมผัสเท่านั้น ในบางกรณีนี่อาจเป็นเรื่องปกติ แต่โดยส่วนใหญ่ถือว่าเป็นปัญหาร้ายแรง
แต่ในขณะเดียวกัน วิธีการดังกล่าวทั้งหมดก็มีข้อบกพร่องบางประการ ประกอบกับกระบวนการลดความเร็วทำให้กำลังโดยรวมของเครื่องยนต์ลดลงด้วย บางครั้งก็สามารถหยุดได้เพียงแค่ใช้มือสัมผัสเท่านั้น ในบางกรณีนี่อาจเป็นเรื่องปกติ แต่โดยส่วนใหญ่ถือว่าเป็นปัญหาร้ายแรง
ตัวเลือกที่ยอมรับได้มากที่สุดคือการทำหน้าที่ปรับความเร็วโดยใช้ การใช้งานเครื่องกำเนิดไฟฟ้าแบบ tachogenerator.
ส่วนใหญ่มักติดตั้งที่โรงงาน เมื่อความเร็วในการหมุนของมอเตอร์เบี่ยงเบนผ่านไทรแอกในมอเตอร์ แหล่งจ่ายไฟที่ปรับไว้แล้วจะถูกส่งไปพร้อมกับความเร็วในการหมุนที่ต้องการ หากมีการควบคุมการหมุนของมอเตอร์ในตัวคอนเทนเนอร์ดังกล่าว กำลังจะไม่สูญเสียไป
สิ่งนี้มีลักษณะอย่างไรในการออกแบบ? ที่สำคัญที่สุดคือการควบคุมรีโอสแตทของกระบวนการหมุนซึ่งสร้างขึ้นจากการใช้เซมิคอนดักเตอร์
ในกรณีแรกเราจะพูดถึงความต้านทานแบบแปรผันโดยใช้กระบวนการปรับเชิงกล มันจะเชื่อมต่อแบบอนุกรมกับมอเตอร์คอมมิวเตเตอร์ ข้อเสียในกรณีนี้คือการปล่อยความร้อนเพิ่มเติมและการสิ้นเปลืองทรัพยากรของแบตเตอรี่ทั้งหมดเพิ่มเติม ในระหว่างการปรับค่าดังกล่าว การสูญเสียกำลังโดยทั่วไปเกิดขึ้นเมื่อมอเตอร์หมุน ถือเป็นทางเลือกที่ประหยัดที่สุด ไม่ใช้กับมอเตอร์ที่มีกำลังค่อนข้างสูงด้วยเหตุผลข้างต้น
ในกรณีที่สองในระหว่างการใช้เซมิคอนดักเตอร์ กระบวนการควบคุมมอเตอร์เกิดขึ้นโดยการใช้พัลส์จำนวนหนึ่ง วงจรสามารถเปลี่ยนระยะเวลาของพัลส์ดังกล่าวได้ซึ่งในทางกลับกันจะเปลี่ยนความเร็วโดยรวมของการหมุนของมอเตอร์โดยไม่สูญเสียกำลัง
 หากไม่ต้องการผลิตอุปกรณ์เองแต่ต้องการซื้ออุปกรณ์ที่พร้อมใช้งานก็ควรให้ความใส่ใจเป็นพิเศษกับพารามิเตอร์และคุณสมบัติหลักๆ เช่น กำลังไฟ ประเภทระบบควบคุมอุปกรณ์ แรงดันไฟฟ้าในเครื่อง ความถี่ และแรงดันไฟฟ้าในการทำงาน เป็นการดีที่สุดที่จะคำนวณลักษณะทั่วไปของกลไกทั้งหมดซึ่งควรใช้ตัวควบคุมแรงดันไฟฟ้าของมอเตอร์ทั่วไป โปรดจำไว้ว่าคุณต้องทำการเปรียบเทียบกับพารามิเตอร์ของตัวแปลงความถี่
หากไม่ต้องการผลิตอุปกรณ์เองแต่ต้องการซื้ออุปกรณ์ที่พร้อมใช้งานก็ควรให้ความใส่ใจเป็นพิเศษกับพารามิเตอร์และคุณสมบัติหลักๆ เช่น กำลังไฟ ประเภทระบบควบคุมอุปกรณ์ แรงดันไฟฟ้าในเครื่อง ความถี่ และแรงดันไฟฟ้าในการทำงาน เป็นการดีที่สุดที่จะคำนวณลักษณะทั่วไปของกลไกทั้งหมดซึ่งควรใช้ตัวควบคุมแรงดันไฟฟ้าของมอเตอร์ทั่วไป โปรดจำไว้ว่าคุณต้องทำการเปรียบเทียบกับพารามิเตอร์ของตัวแปลงความถี่